 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLow Fidelity Digital Twin for Automated Driving Systems: Use Cases and Automatic Generation
May 22, 2024


Automated driving systems are an integral part of the automotive industry. Tools such as Robot Operating System and simulators support their development. However, in the end, the developers must test their algorithms on a real vehicle. To better observe the difference between reality and simulation--the reality gap--digital twin technology offers real-time communication between the real vehicle and its model. We present low fidelity digital twin generator and describe situations where automatic generation is preferable to high fidelity simulation. We validated our approach of generating a virtual environment with a vehicle model by replaying the data recorded from the real vehicle.
Improving RRT for Automated Parking in Real-world Scenarios
Oct 31, 2023



Automated parking is a self-driving feature that has been in cars for several years. Parking assistants in currently sold cars fail to park in more complex real-world scenarios and require the driver to move the car to an expected starting position before the assistant is activated. We overcome these limitations by proposing a planning algorithm consisting of two stages: (1) a geometric planner for maneuvering inside the parking slot and (2) a Rapidly-exploring Random Trees (RRT)-based planner that finds a collision-free path from the initial position to the slot entry. Evaluation of computational experiments demonstrates that improvements over commonly used RRT extensions reduce the parking path cost by 21 % and reduce the computation time by 79.5 %. The suitability of the algorithm for real-world parking scenarios was verified in physical experiments with Porsche Cayenne.
Parallel Parking: Optimal Entry and Minimum Slot Dimensions
May 05, 2022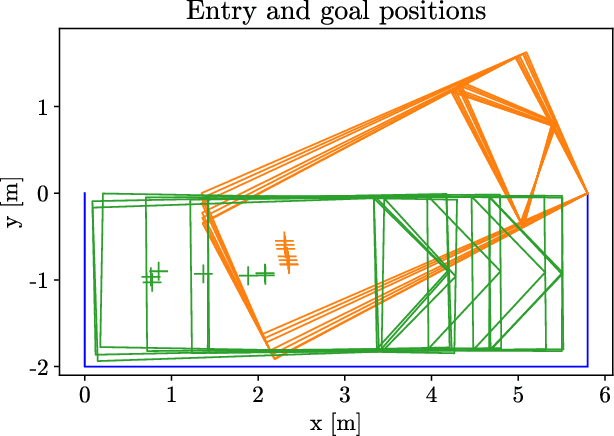
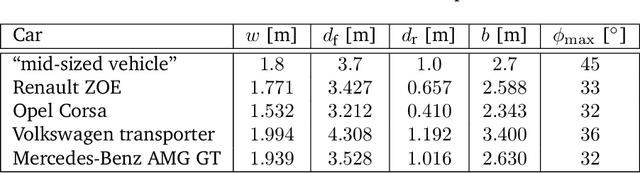
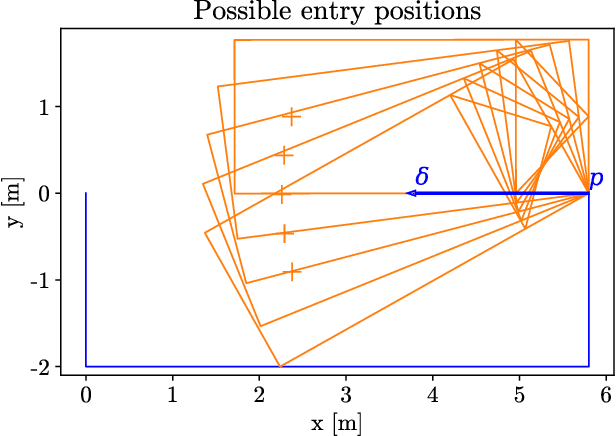
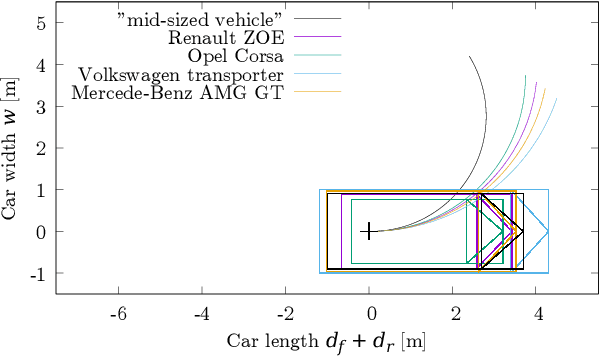
The problem of path planning for automated parking is usually presented as finding a collision-free path from initial to goal positions, where three out of four parking slot edges represent obstacles. We rethink the path planning problem for parallel parking by decomposing it into two independent parts. The topic of this paper is finding optimal parking slot entry positions. Path planning from initial to entry position is out of scope here. We show the relation between entry positions, parking slot dimensions, and the number of backward-forward direction changes. This information can be used as an input to optimize other parts of the automated parking process.
* 14 pages (title + 9 of paper + 4 of appendix), 11 (paper) + 4 (appendix) figures, sent to VEHITS 2022 conference
Accelerated RRT* and its evaluation on Autonomous Parking
Feb 11, 2020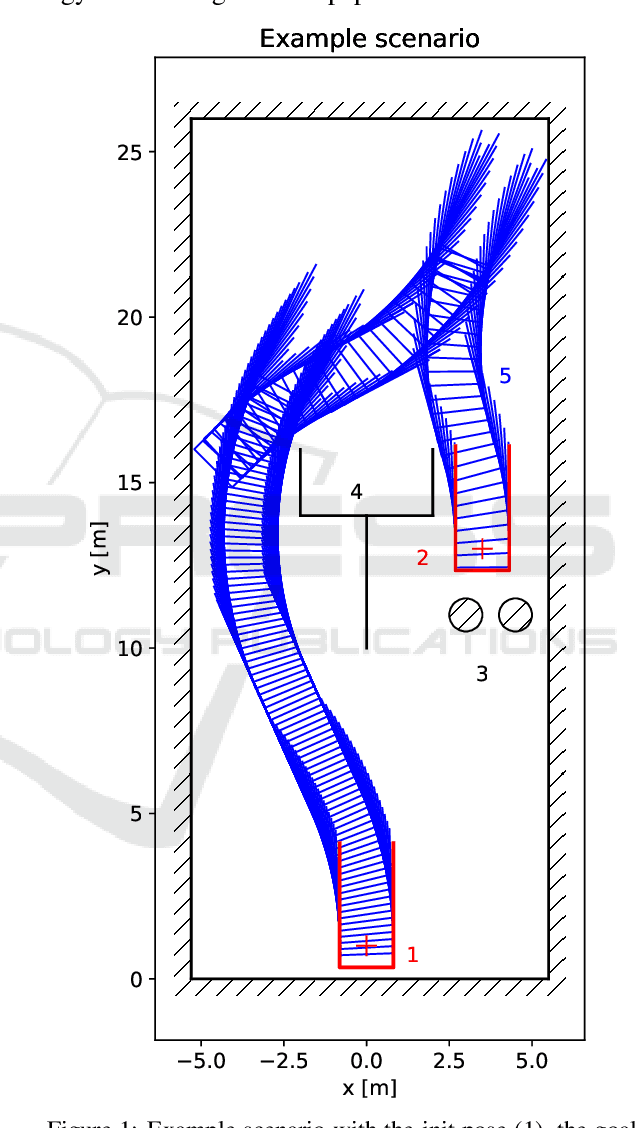
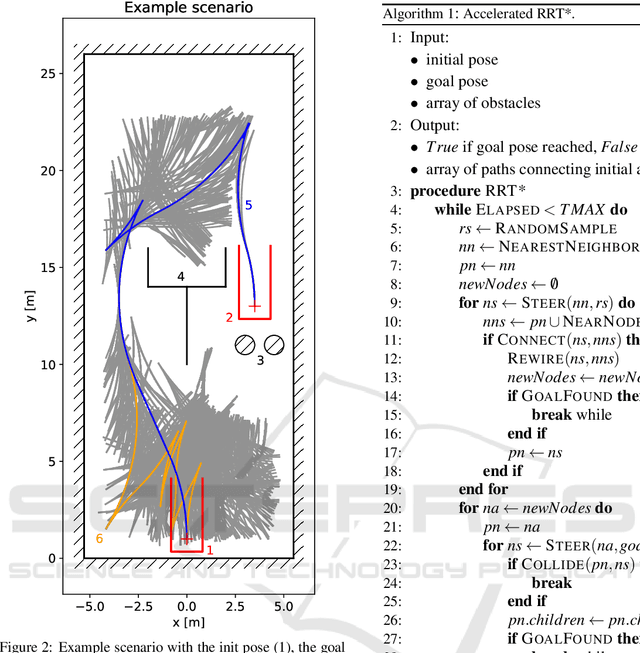
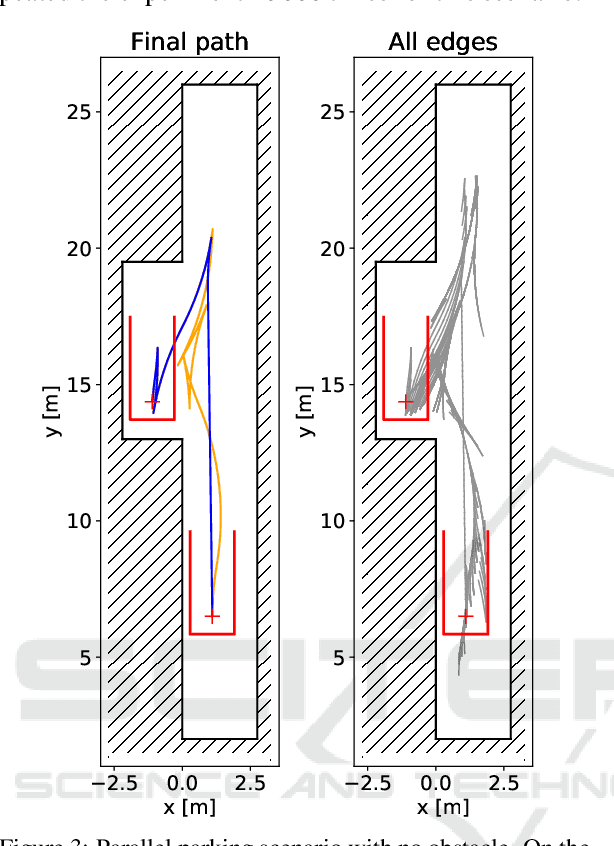
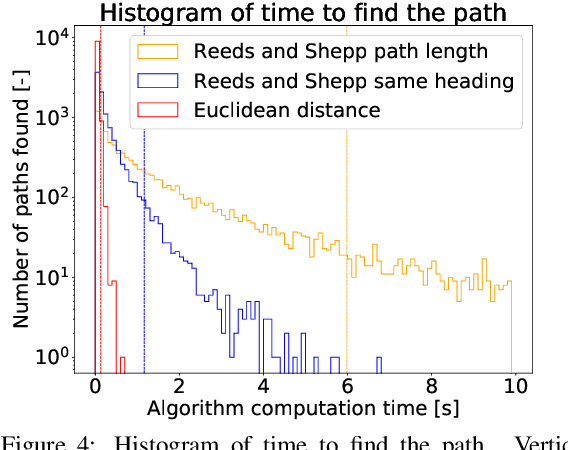
Finding a collision-free path for autonomous parking is usually performed by computing geometric equations, but the geometric approach may become unusable under challenging situations where space is highly constrained. We propose an algorithm based on Rapidly-Exploring Random Trees Star (RRT*), which works even in highly constrained environments and improvements to RRT*-based algorithm that accelerate computational time and decrease the final path cost. Our improved RRT* algorithm found a path for parallel parking maneuver in 95 % of cases in less than 0.15 seconds.
* 12 pages, 6 figures, 3 pseudocodes, VEHITS 2019 conference proceedings