Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccelerated RRT* and its evaluation on Autonomous Parking
Paper and Code
Feb 11, 2020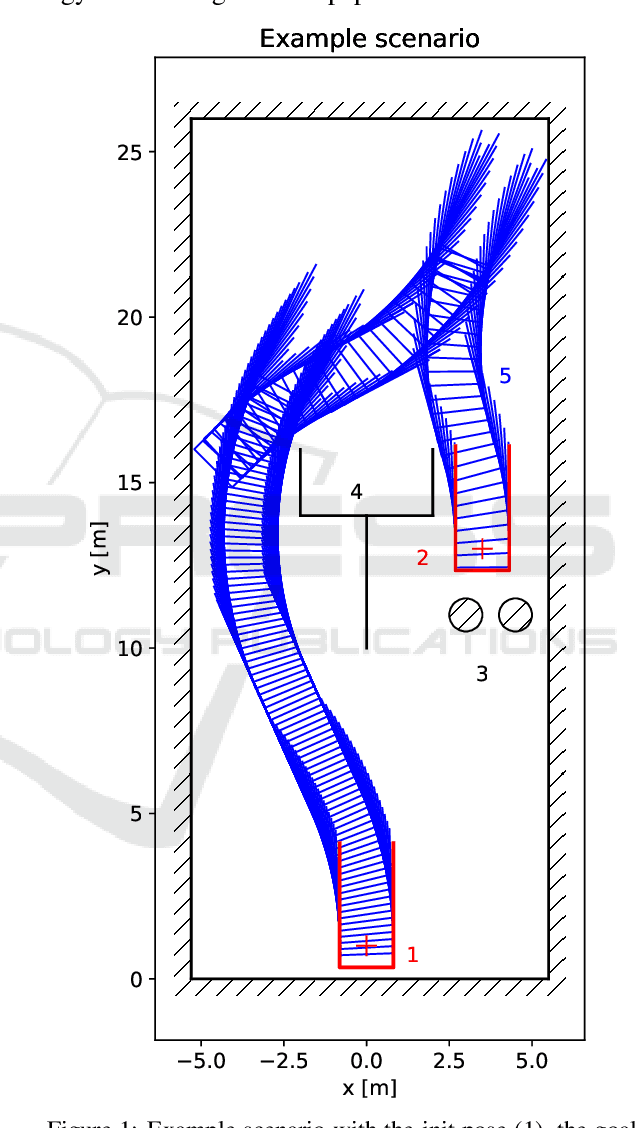
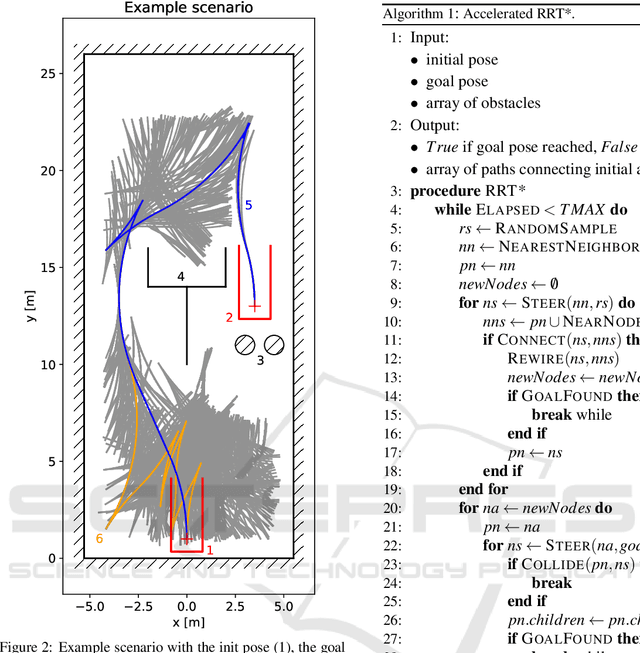
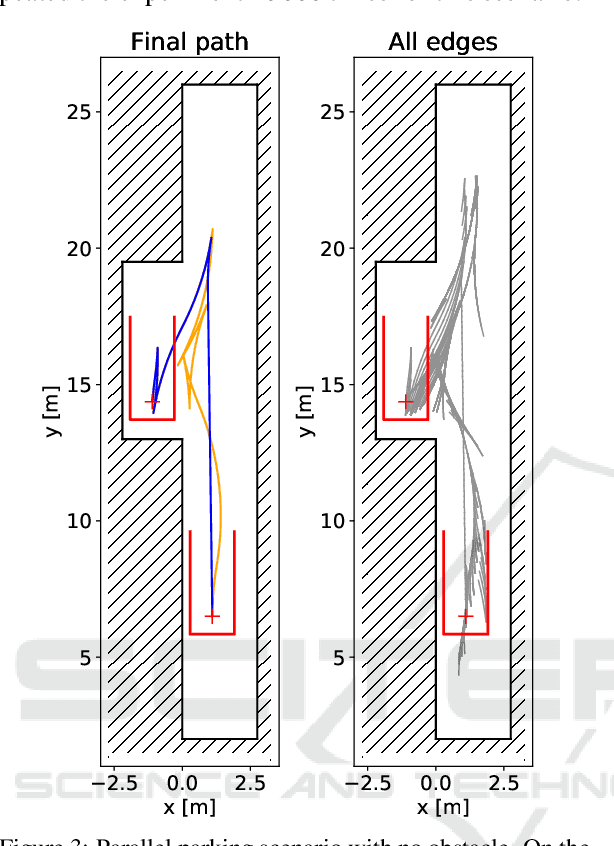
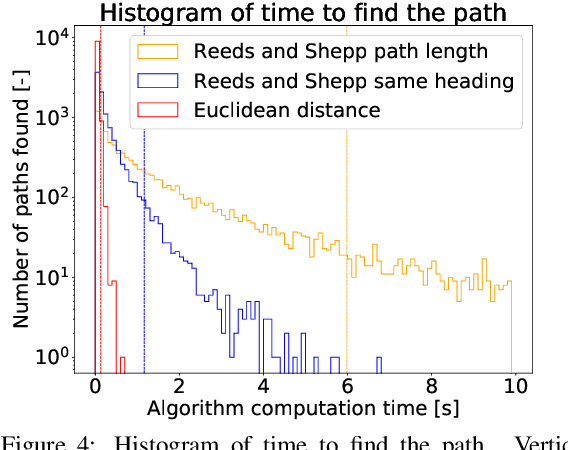
Finding a collision-free path for autonomous parking is usually performed by computing geometric equations, but the geometric approach may become unusable under challenging situations where space is highly constrained. We propose an algorithm based on Rapidly-Exploring Random Trees Star (RRT*), which works even in highly constrained environments and improvements to RRT*-based algorithm that accelerate computational time and decrease the final path cost. Our improved RRT* algorithm found a path for parallel parking maneuver in 95 % of cases in less than 0.15 seconds.
* Proceedings of the 5th International Conference on Vehicle
Technology and Intelligent Transport Systems - Volume 1: VEHITS, pages 86-94.
INSTICC, SciTePress, 2019 * 12 pages, 6 figures, 3 pseudocodes, VEHITS 2019 conference
proceedings
View paper on