 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTunable Online MUS/MSS Enumeration
Jun 10, 2016



In various areas of computer science, the problem of dealing with a set of constraints arises. If the set of constraints is unsatisfiable, one may ask for a minimal description of the reason for this unsatisifi- ability. Minimal unsatisifable subsets (MUSes) and maximal satisifiable subsets (MSSes) are two kinds of such minimal descriptions. The goal of this work is the enumeration of MUSes and MSSes for a given constraint system. As such full enumeration may be intractable in general, we focus on building an online algorithm, which produces MUSes/MSSes in an on-the-fly manner as soon as they are discovered. The problem has been studied before even in its online version. However, our algorithm uses a novel approach that is able to outperform current state-of-the art algorithms for online MUS/MSS enumeration. Moreover, the performance of our algorithm can be adjusted using tunable parameters. We evaluate the algorithm on a set of benchmarks.
Attraction-Based Receding Horizon Path Planning with Temporal Logic Constraints
Aug 29, 2012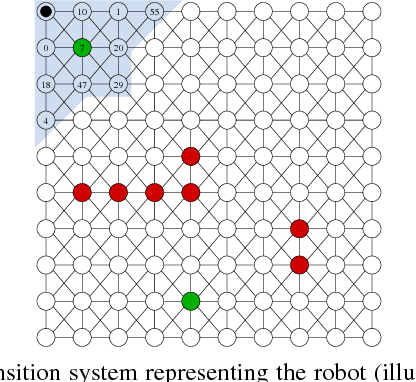
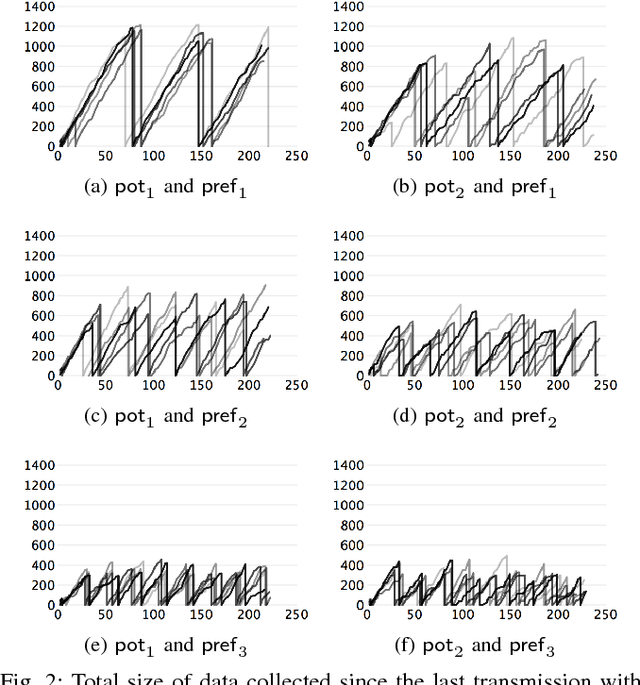
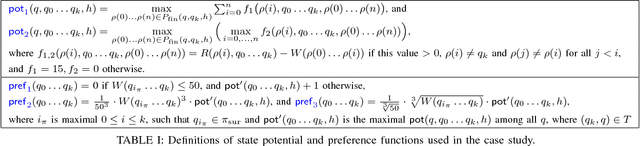
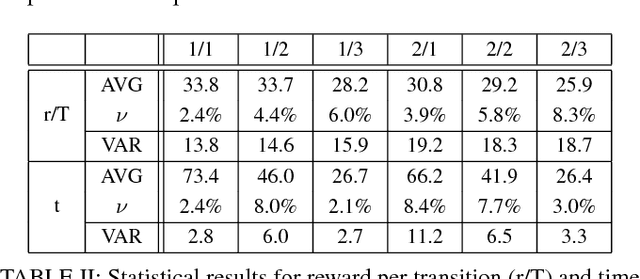
Our goal in this paper is to plan the motion of a robot in a partitioned environment with dynamically changing, locally sensed rewards. We assume that arbitrary assumptions on the reward dynamics can be given. The robot aims to accomplish a high-level temporal logic surveillance mission and to locally optimize the collection of the rewards in the visited regions. These two objectives often conflict and only a compromise between them can be reached. We address this issue by taking into consideration a user-defined preference function that captures the trade-off between the importance of collecting high rewards and the importance of making progress towards a surveyed region. Our solution leverages ideas from the automata-based approach to model checking. We demonstrate the utilization and benefits of the suggested framework in an illustrative example.