 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimization-Based Visual-Inertial SLAM Tightly Coupled with Raw GNSS Measurements
Oct 22, 2020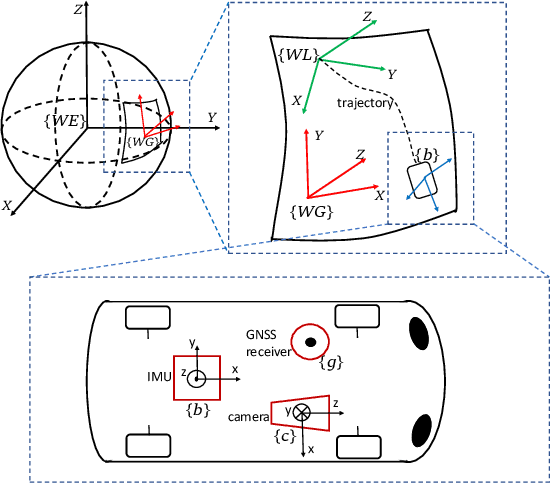
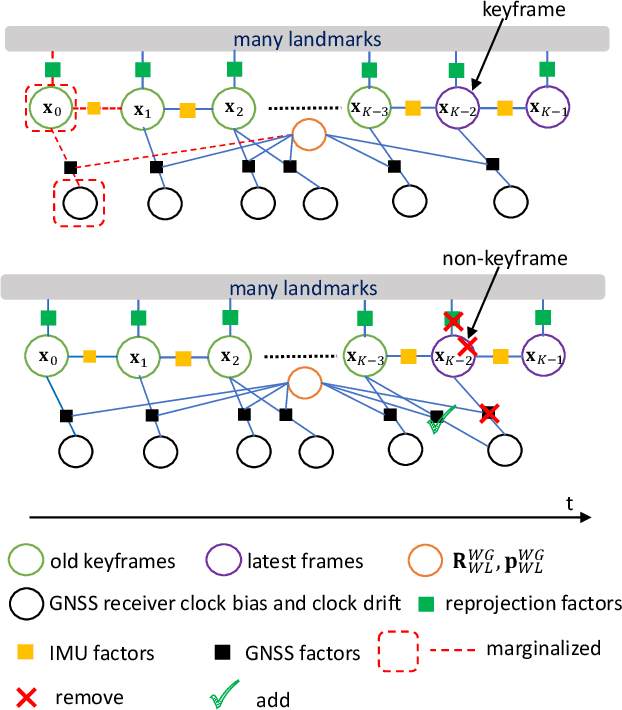
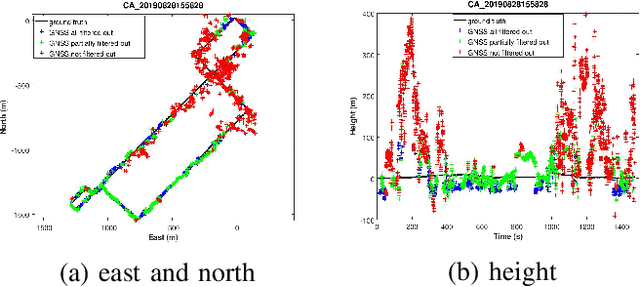
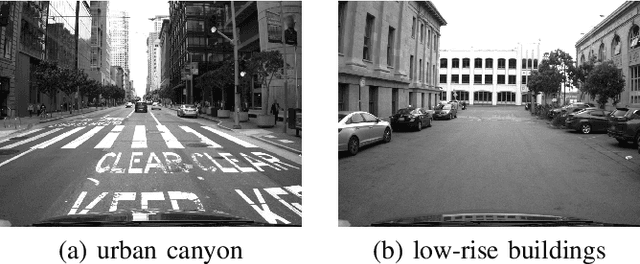
Fusing vision, Inertial Measurement Unit (IMU) and Global Navigation Satellite System (GNSS) information is a promising solution for accurate global positioning in complex urban scenes, because of the complementarity of the different sensors. Unlike the loose coupling approaches and the EKF-based approaches in the literature, we propose an optimization-based visual-inertial SLAM tightly coupled with raw GNSS measurements, including pseudoranges and Doppler shift, which is the first of such approaches to our knowledge. Reprojection error, IMU pre-integration error and raw GNSS measurement error are jointly optimized using bundle adjustment in a sliding window, and the asynchronism between images and raw GNSS measurements is considered. Marginalization is performed in the sliding window, and some methods dealing with noisy measurements and vulnerable situations are employed. Experimental results on public dataset in complex urban scenes prove that our proposed approach outperforms state-of-the-art visual-inertial SLAM, GNSS single point positioning, as well as a loose coupling approach, both in the scenes that mainly contain low-rise buildings and the scenes that contain urban canyons.
Bidirectional Trajectory Computation for Odometer-Aided Visual-Inertial SLAM
Feb 01, 2020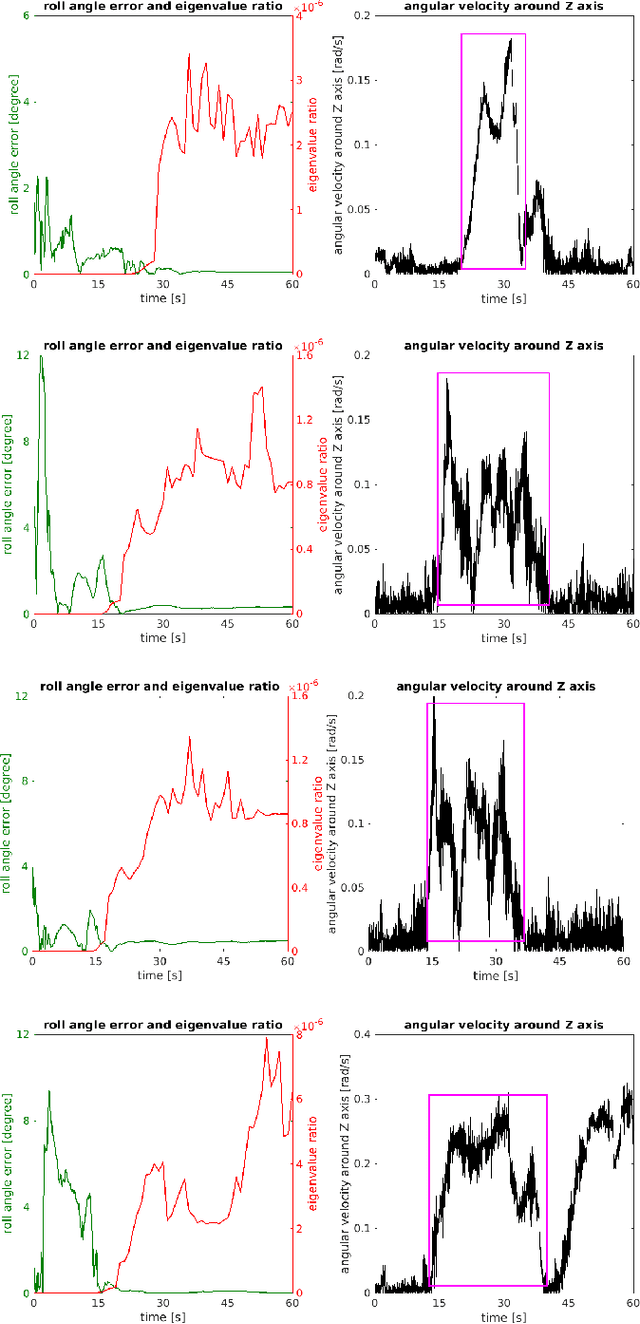
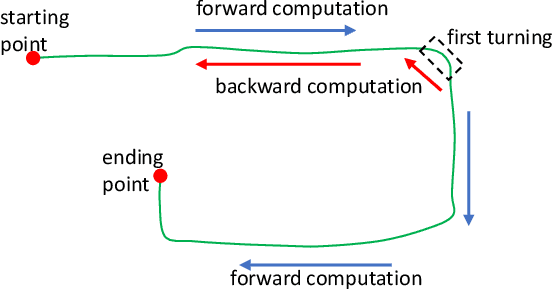
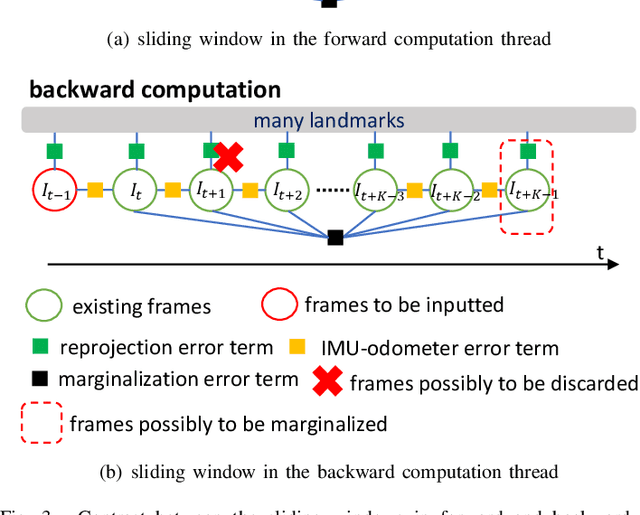
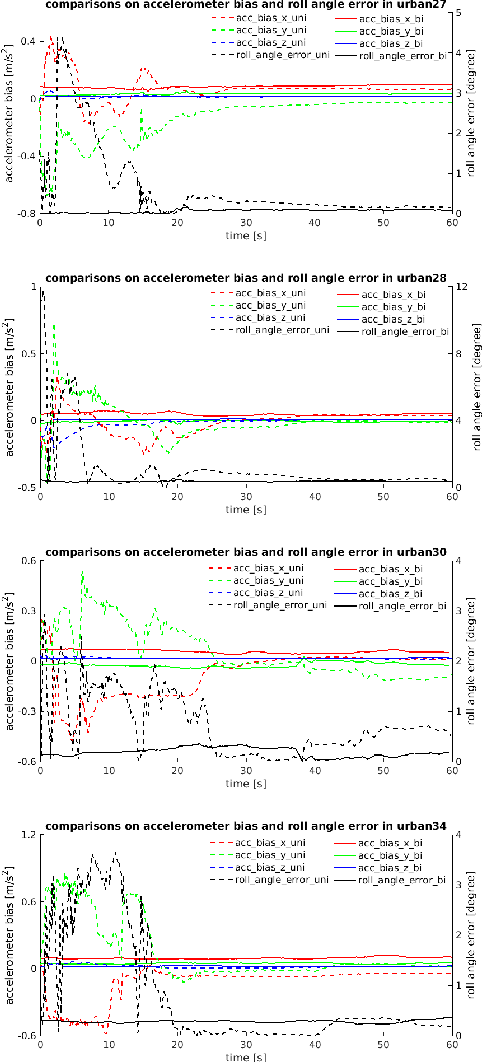
Odometer-aided visual-inertial SLAM systems typically have a good performance for navigation of wheeled platforms, while they usually suffer from degenerate cases before the first turning. In this paper, firstly we perform an observability analysis w.r.t. the extrinsic parameters before the first turning, which is a complement of the existing results of observability analyses. Secondly, inspired by the above observability analyses, we propose a bidirectional trajectory computation method, by which the poses before the first turning are refined in the backward computation thread, and the real-time trajectory is adjusted accordingly. Experimental results prove that our proposed method not only solves the problem of the unobservability of accelerometer bias and extrinsic parameters before the first turning, but also results in more accurate trajectories in comparison with the state-of-the-art approaches.