 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-lane Detection Using Instance Segmentation and Attentive Voting
Jan 01, 2020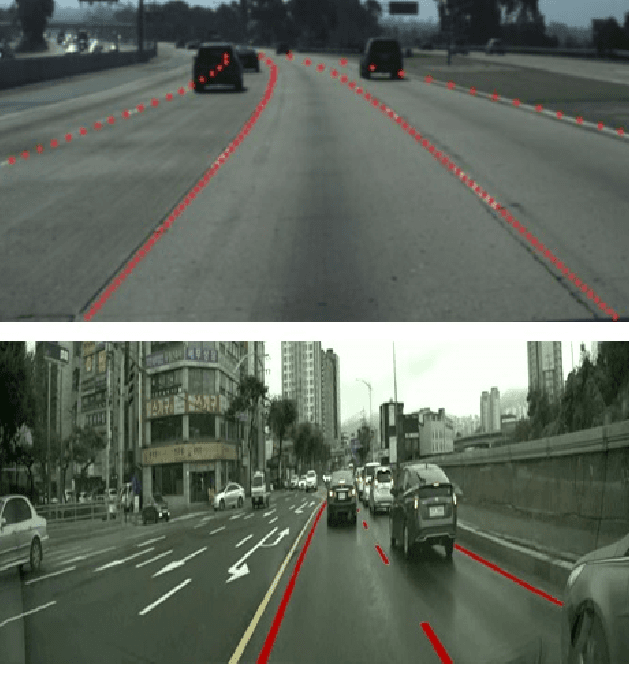
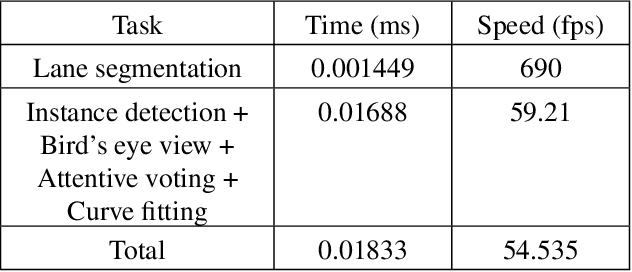
Autonomous driving is becoming one of the leading industrial research areas. Therefore many automobile companies are coming up with semi to fully autonomous driving solutions. Among these solutions, lane detection is one of the vital driver-assist features that play a crucial role in the decision-making process of the autonomous vehicle. A variety of solutions have been proposed to detect lanes on the road, which ranges from using hand-crafted features to the state-of-the-art end-to-end trainable deep learning architectures. Most of these architectures are trained in a traffic constrained environment. In this paper, we propose a novel solution to multi-lane detection, which outperforms state of the art methods in terms of both accuracy and speed. To achieve this, we also offer a dataset with a more intuitive labeling scheme as compared to other benchmark datasets. Using our approach, we are able to obtain a lane segmentation accuracy of 99.87% running at 54.53 fps (average).