 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-Universe Assistance Games
Aug 20, 2025Embodied AI agents must infer and act in an interpretable way on diverse human goals and preferences that are not predefined. To formalize this setting, we introduce Open-Universe Assistance Games (OU-AGs), a framework where the agent must reason over an unbounded and evolving space of possible goals. In this context, we introduce GOOD (GOals from Open-ended Dialogue), a data-efficient, online method that extracts goals in the form of natural language during an interaction with a human, and infers a distribution over natural language goals. GOOD prompts an LLM to simulate users with different complex intents, using its responses to perform probabilistic inference over candidate goals. This approach enables rich goal representations and uncertainty estimation without requiring large offline datasets. We evaluate GOOD in a text-based grocery shopping domain and in a text-operated simulated household robotics environment (AI2Thor), using synthetic user profiles. Our method outperforms a baseline without explicit goal tracking, as confirmed by both LLM-based and human evaluations.
Goal Inference from Open-Ended Dialog
Oct 17, 2024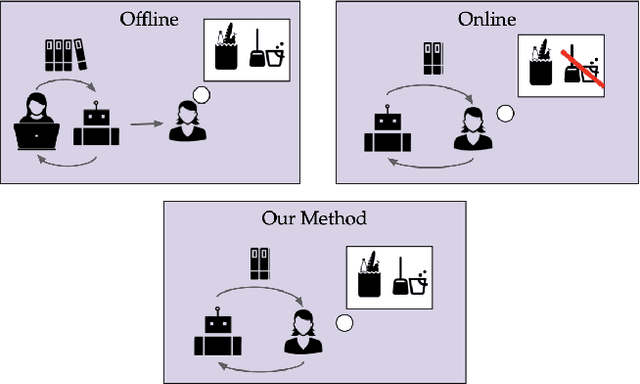

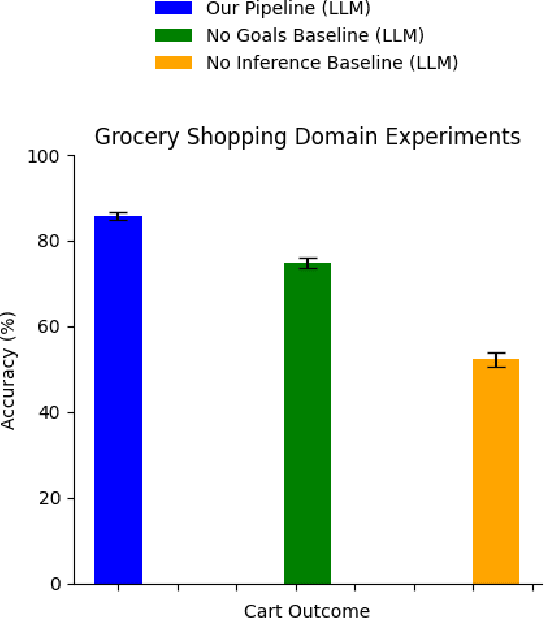
We present an online method for embodied agents to learn and accomplish diverse user goals. While offline methods like RLHF can represent various goals but require large datasets, our approach achieves similar flexibility with online efficiency. We extract natural language goal representations from conversations with Large Language Models (LLMs). We prompt an LLM to role play as a human with different goals and use the corresponding likelihoods to run Bayesian inference over potential goals. As a result, our method can represent uncertainty over complex goals based on unrestricted dialog. We evaluate our method in grocery shopping and home robot assistance domains using a text-based interface and AI2Thor simulation respectively. Results show our method outperforms ablation baselines that lack either explicit goal representation or probabilistic inference.