 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePseudo-Differential Integral Operator for Learning Solution Operators of Partial Differential Equations
Feb 16, 2022

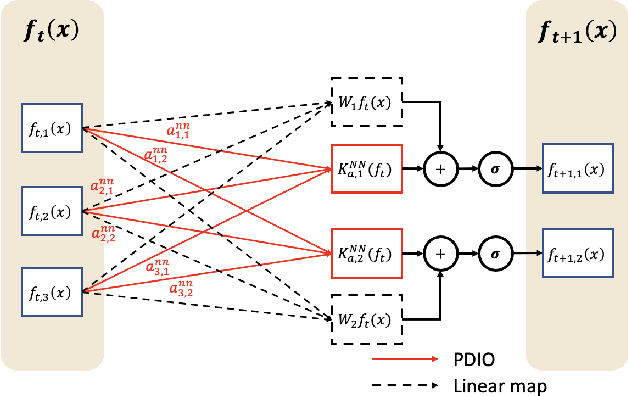

Learning mapping between two function spaces has attracted considerable research attention. However, learning the solution operator of partial differential equations (PDEs) remains a challenge in scientific computing. Therefore, in this study, we propose a novel pseudo-differential integral operator (PDIO) inspired by a pseudo-differential operator, which is a generalization of a differential operator and characterized by a certain symbol. We parameterize the symbol by using a neural network and show that the neural-network-based symbol is contained in a smooth symbol class. Subsequently, we prove that the PDIO is a bounded linear operator, and thus is continuous in the Sobolev space. We combine the PDIO with the neural operator to develop a pseudo-differential neural operator (PDNO) to learn the nonlinear solution operator of PDEs. We experimentally validate the effectiveness of the proposed model by using Burgers' equation, Darcy flow, and the Navier-Stokes equation. The results reveal that the proposed PDNO outperforms the existing neural operator approaches in most experiments.
Solving PDE-constrained Control Problems using Operator Learning
Nov 09, 2021



The modeling and control of complex physical dynamics are essential in real-world problems. We propose a novel framework that is generally applicable to solving PDE-constrained optimal control problems by introducing surrogate models for PDE solution operators with special regularizers. The procedure of the proposed framework is divided into two phases: solution operator learning for PDE constraints (Phase 1) and searching for optimal control (Phase 2). Once the surrogate model is trained in Phase 1, the optimal control can be inferred in Phase 2 without intensive computations. Our framework can be applied to both data-driven and data-free cases. We demonstrate the successful application of our method to various optimal control problems for different control variables with diverse PDE constraints from the Poisson equation to Burgers' equation.