Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving agent performance in fluid environments by perceptual pretraining
Sep 05, 2024


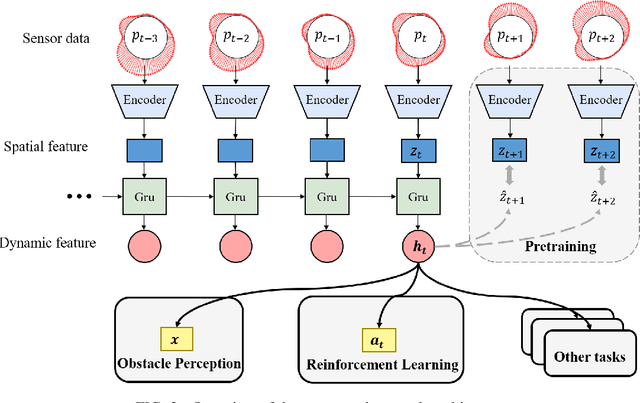
In this paper, we construct a pretraining framework for fluid environment perception, which includes an information compression model and the corresponding pretraining method. We test this framework in a two-cylinder problem through numerical simulation. The results show that after unsupervised pretraining with this framework, the intelligent agent can acquire key features of surrounding fluid environment, thereby adapting more quickly and effectively to subsequent multi-scenario tasks. In our research, these tasks include perceiving the position of the upstream obstacle and actively avoiding shedding vortices in the flow field to achieve drag reduction. Better performance of the pretrained agent is discussed in the sensitivity analysis.
Via