 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransGrasp: Grasp Pose Estimation of a Category of Objects by Transferring Grasps from Only One Labeled Instance
Jul 25, 2022

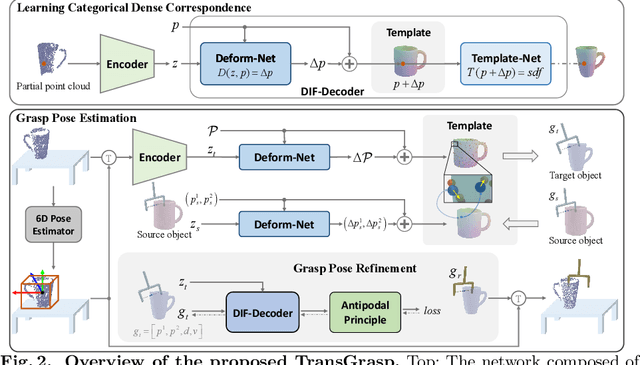

Grasp pose estimation is an important issue for robots to interact with the real world. However, most of existing methods require exact 3D object models available beforehand or a large amount of grasp annotations for training. To avoid these problems, we propose TransGrasp, a category-level grasp pose estimation method that predicts grasp poses of a category of objects by labeling only one object instance. Specifically, we perform grasp pose transfer across a category of objects based on their shape correspondences and propose a grasp pose refinement module to further fine-tune grasp pose of grippers so as to ensure successful grasps. Experiments demonstrate the effectiveness of our method on achieving high-quality grasps with the transferred grasp poses. Our code is available at https://github.com/yanjh97/TransGrasp.