 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Visual-inertial Navigation Method for High-Speed Unmanned Aerial Vehicles
Feb 12, 2020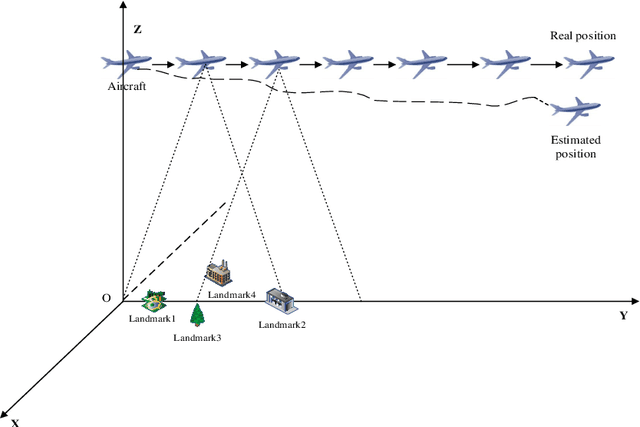

This paper investigates the localization problem of high-speed high-altitude unmanned aerial vehicle (UAV) with a monocular camera and inertial navigation system. It proposes a navigation method utilizing the complementarity of vision and inertial devices to overcome the singularity which arises from the horizontal flight of UAV. Furthermore, it modifies the mathematical model of localization problem via separating linear parts from nonlinear parts and replaces a nonlinear least-squares problem with a linearly equality-constrained optimization problem. In order to avoid the ill-condition property near the optimal point of sequential unconstrained minimization techniques(penalty methods), it constructs a semi-implicit continuous method with a trust-region technique based on a differential-algebraic dynamical system to solve the linearly equality-constrained optimization problem. It also analyzes the global convergence property of the semi-implicit continuous method in an infinity integrated interval other than the traditional convergence analysis of numerical methods for ordinary differential equations in a finite integrated interval. Finally, the promising numerical results are also presented.