Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty Propagation in Deep Neural Networks Using Extended Kalman Filtering
Sep 17, 2018
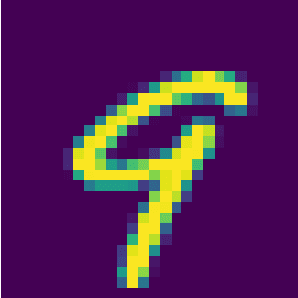

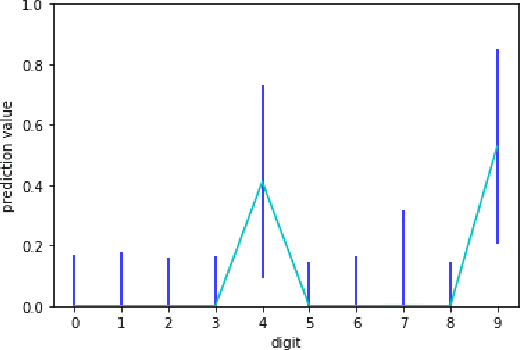
Extended Kalman Filtering (EKF) can be used to propagate and quantify input uncertainty through a Deep Neural Network (DNN) assuming mild hypotheses on the input distribution. This methodology yields results comparable to existing methods of uncertainty propagation for DNNs while lowering the computational overhead considerably. Additionally, EKF allows model error to be naturally incorporated into the output uncertainty.
* 4 Pages, 8 figures. Accepted at MIT IEEE Undergraduate Research
Technology Conference 2018. Publication pending
Via