 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards a Science of Mind
Nov 06, 2018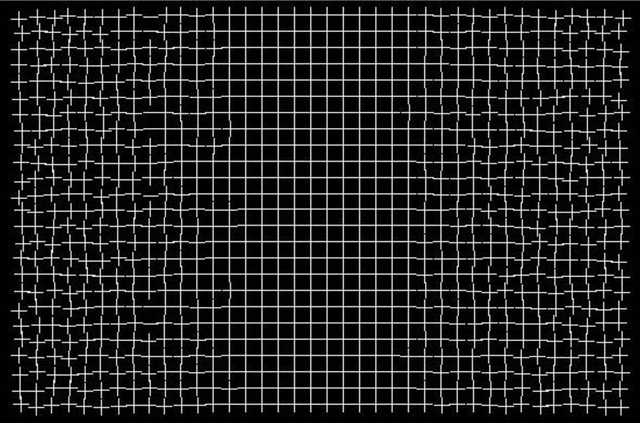
The ancient mind/body problem continues to be one of deepest mysteries of science and of the human spirit. Despite major advances in many fields, there is still no plausible link between subjective experience (qualia) and its realization in the body. This paper outlines some of the elements of a rigorous science of mind (SoM) - key ideas include scientific realism of mind, agnostic mysterianism, careful attention to language, and a focus on concrete (touchstone) questions and results.
Mysteries of Visual Experience
Mar 20, 2018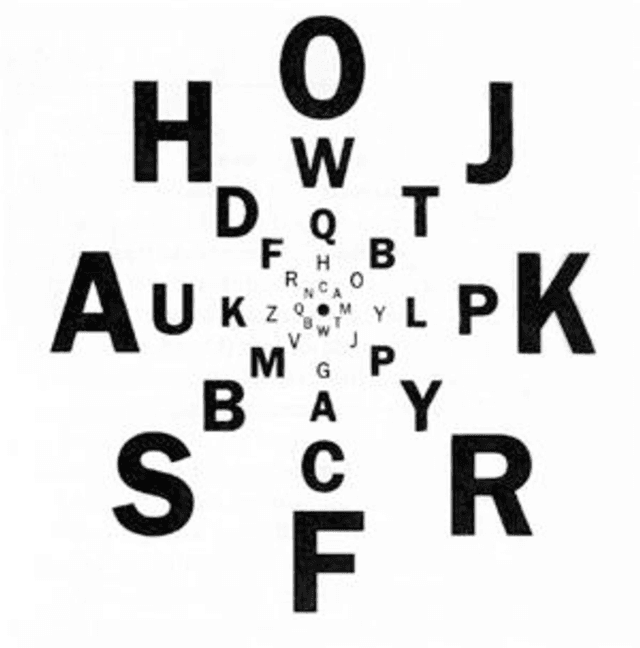

Science is a crowning glory of the human spirit and its applications remain our best hope for social progress. But there are limitations to current science and perhaps to any science. The general mind-body problem is known to be intractable and currently mysterious. This is one of many deep problems that are universally agreed to be beyond the current purview of Science, including quantum phenomena, etc. But all of these famous unsolved problems are either remote from everyday experience (entanglement, dark matter) or are hard to even define sharply (phenomenology, consciousness, etc.). In this note, we will consider some obvious computational problems in vision that arise every time that we open our eyes and yet are demonstrably incompatible with current theories of neural computation. The focus will be on two related phenomena, known as the neural binding problem and the illusion of a detailed stable visual world.
Processing Natural Language About Ongoing Actions
Jul 30, 2016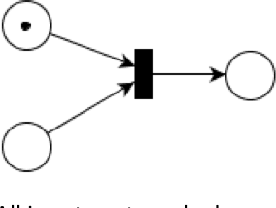
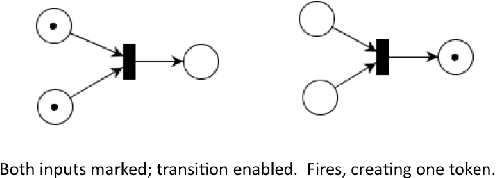
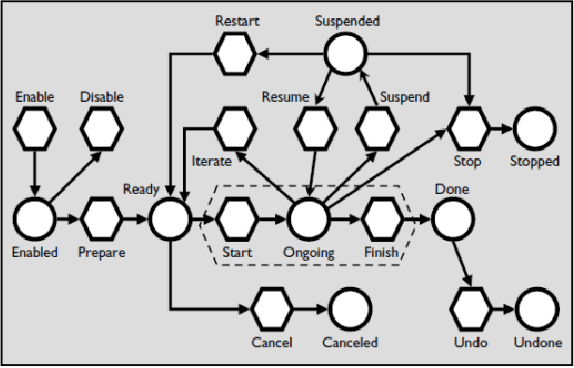
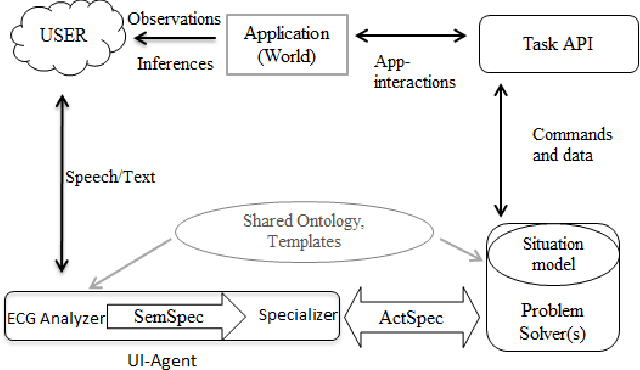
Actions may not proceed as planned; they may be interrupted, resumed or overridden. This is a challenge to handle in a natural language understanding system. We describe extensions to an existing implementation for the control of autonomous systems by natural language, to enable such systems to handle incoming language requests regarding actions. Language Communication with Autonomous Systems (LCAS) has been extended with support for X-nets, parameterized executable schemas representing actions. X-nets enable the system to control actions at a desired level of granularity, while providing a mechanism for language requests to be processed asynchronously. Standard semantics supported include requests to stop, continue, or override the existing action. The specific domain demonstrated is the control of motion of a simulated robot, but the approach is general, and could be applied to other domains.
Exploiting Deep Semantics and Compositionality of Natural Language for Human-Robot-Interaction
Apr 22, 2016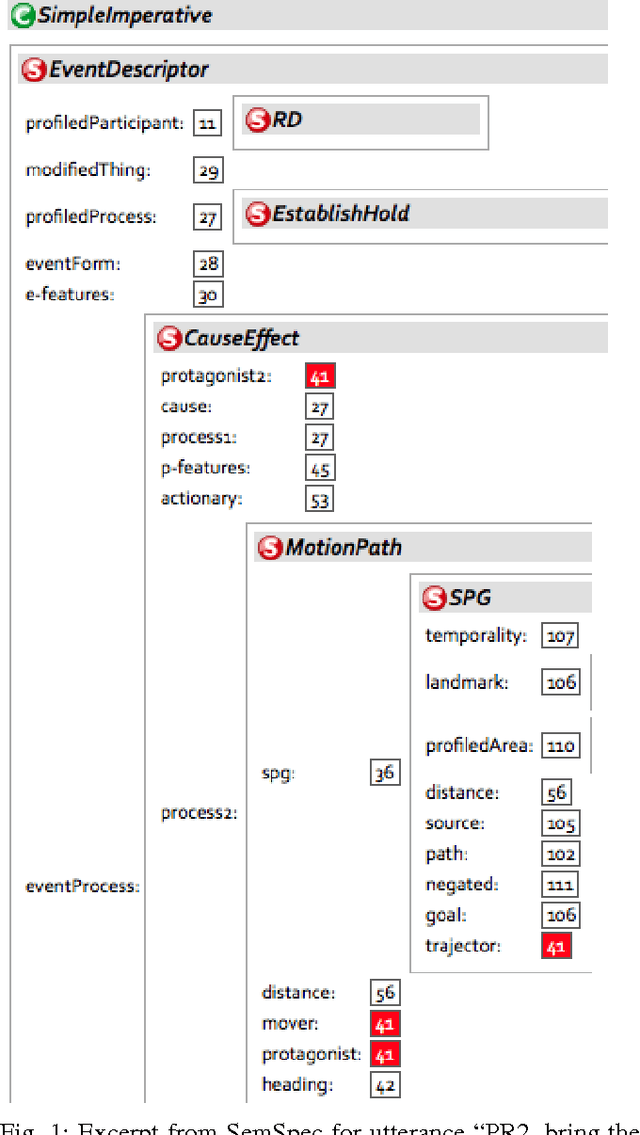

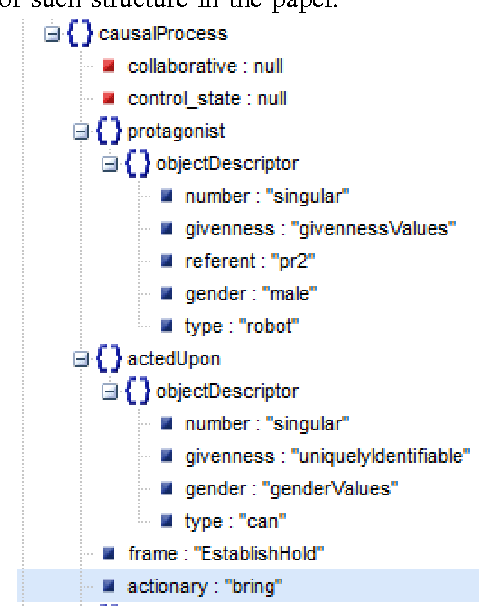

We develop a natural language interface for human robot interaction that implements reasoning about deep semantics in natural language. To realize the required deep analysis, we employ methods from cognitive linguistics, namely the modular and compositional framework of Embodied Construction Grammar (ECG) [Feldman, 2009]. Using ECG, robots are able to solve fine-grained reference resolution problems and other issues related to deep semantics and compositionality of natural language. This also includes verbal interaction with humans to clarify commands and queries that are too ambiguous to be executed safely. We implement our NLU framework as a ROS package and present proof-of-concept scenarios with different robots, as well as a survey on the state of the art.