 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGlobalFlowNet: Video Stabilization using Deep Distilled Global Motion Estimates
Nov 04, 2022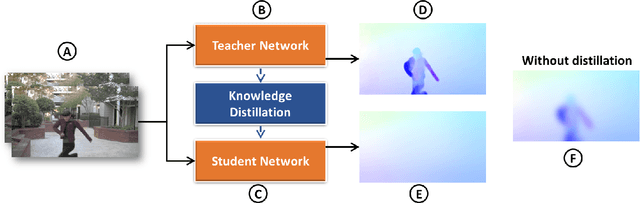

Videos shot by laymen using hand-held cameras contain undesirable shaky motion. Estimating the global motion between successive frames, in a manner not influenced by moving objects, is central to many video stabilization techniques, but poses significant challenges. A large body of work uses 2D affine transformations or homography for the global motion. However, in this work, we introduce a more general representation scheme, which adapts any existing optical flow network to ignore the moving objects and obtain a spatially smooth approximation of the global motion between video frames. We achieve this by a knowledge distillation approach, where we first introduce a low pass filter module into the optical flow network to constrain the predicted optical flow to be spatially smooth. This becomes our student network, named as \textsc{GlobalFlowNet}. Then, using the original optical flow network as the teacher network, we train the student network using a robust loss function. Given a trained \textsc{GlobalFlowNet}, we stabilize videos using a two stage process. In the first stage, we correct the instability in affine parameters using a quadratic programming approach constrained by a user-specified cropping limit to control loss of field of view. In the second stage, we stabilize the video further by smoothing global motion parameters, expressed using a small number of discrete cosine transform coefficients. In extensive experiments on a variety of different videos, our technique outperforms state of the art techniques in terms of subjective quality and different quantitative measures of video stability. The source code is publicly available at \href{https://github.com/GlobalFlowNet/GlobalFlowNet}{https://github.com/GlobalFlowNet/GlobalFlowNet}
Restoration of Non-rigidly Distorted Underwater Images using a Combination of Compressive Sensing and Local Polynomial Image Representations
Aug 06, 2019



Images of static scenes submerged beneath a wavy water surface exhibit severe non-rigid distortions. The physics of water flow suggests that water surfaces possess spatio-temporal smoothness and temporal periodicity. Hence they possess a sparse representation in the 3D discrete Fourier (DFT) basis. Motivated by this, we pose the task of restoration of such video sequences as a compressed sensing (CS) problem. We begin by tracking a few salient feature points across the frames of a video sequence of the submerged scene. Using these point trajectories, we show that the motion fields at all other (non-tracked) points can be effectively estimated using a typical CS solver. This by itself is a novel contribution in the field of non-rigid motion estimation. We show that this method outperforms state of the art algorithms for underwater image restoration. We further consider a simple optical flow algorithm based on local polynomial expansion of the image frames (PEOF). Surprisingly, we demonstrate that PEOF is more efficient and often outperforms all the state of the art methods in terms of numerical measures. Finally, we demonstrate that a two-stage approach consisting of the CS step followed by PEOF much more accurately preserves the image structure and improves the (visual as well as numerical) video quality as compared to just the PEOF stage.
* Accepted in ICCV 2019 for oral presentation