 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-based Initialization Strategy for Safety of Multi-Vehicle Systems
Sep 24, 2021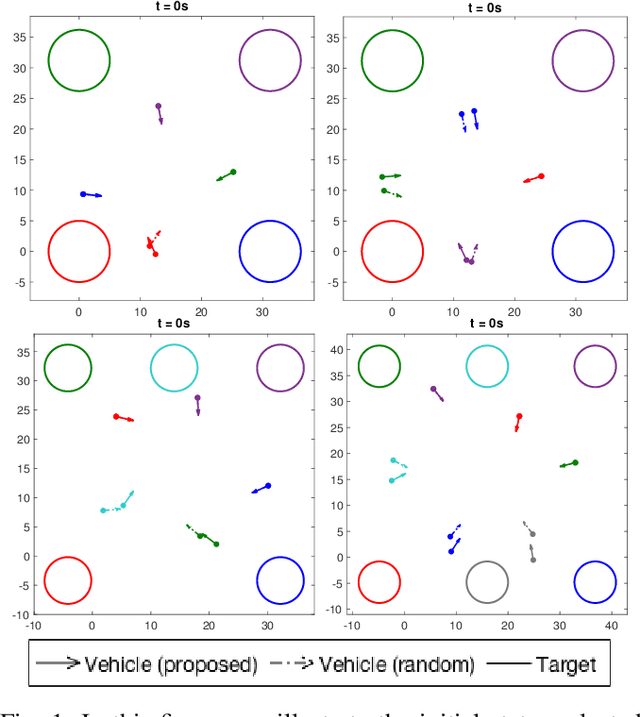
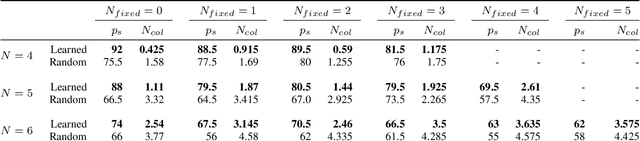
Multi-vehicle collision avoidance is a highly crucial problem due to the soaring interests of introducing autonomous vehicles into the real world in recent years. The safety of these vehicles while they complete their objectives is of paramount importance. Hamilton-Jacobi (HJ) reachability is a promising tool for guaranteeing safety for low-dimensional systems. However, due to its exponential complexity in computation time, no reachability-based methods have been able to guarantee safety for more than three vehicles successfully in unstructured scenarios. For systems with four or more vehicles,we can only empirically validate their safety performance.While reachability-based safety methods enjoy a flexible least-restrictive control strategy, it is challenging to reason about long-horizon trajectories online because safety at any given state is determined by looking up its safety value in a pre-computed table that does not exhibit favorable properties that continuous functions have. This motivates the problem of improving the safety performance of unstructured multi-vehicle systems when safety cannot be guaranteed given any least-restrictive safety-aware collision avoidance algorithm while avoiding online trajectory optimization. In this paper, we propose a novel approach using supervised learning to enhance the safety of vehicles by proposing new initial states in very close neighborhood of the original initial states of vehicles. Our experiments demonstrate the effectiveness of our proposed approach and show that vehicles are able to get to their goals with better safety performance with our approach compared to a baseline approach in wide-ranging scenarios.
Reachability-based Safe Planning for Multi-Vehicle Systems withMultiple Targets
Aug 05, 2021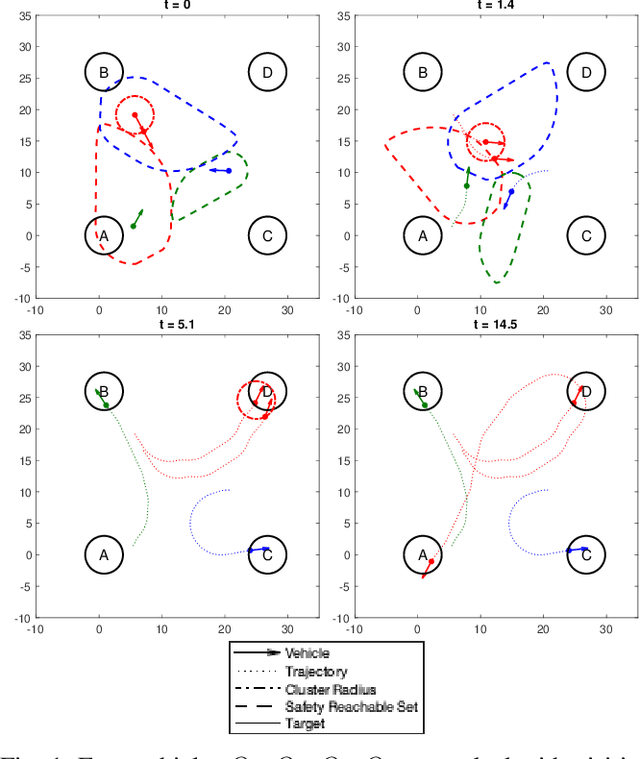
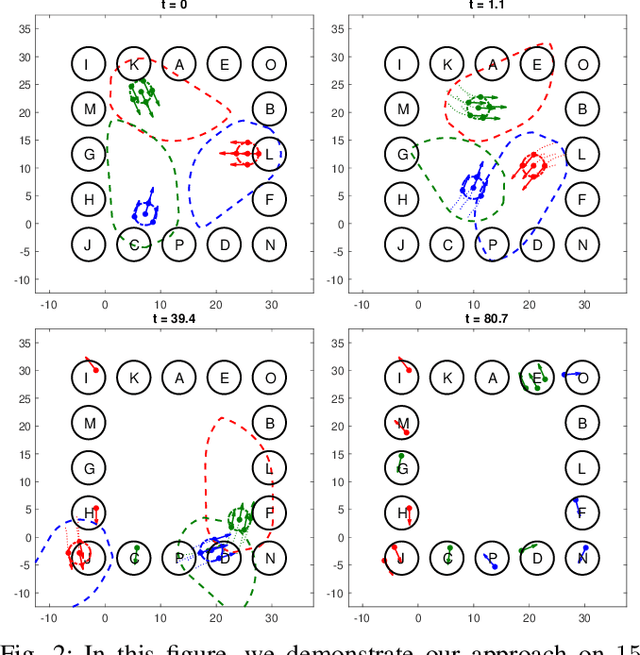
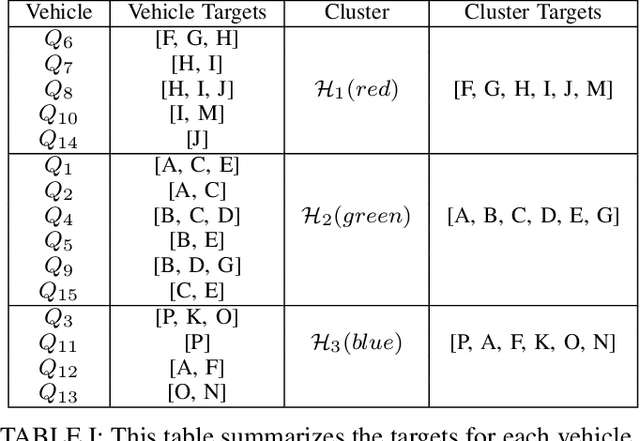
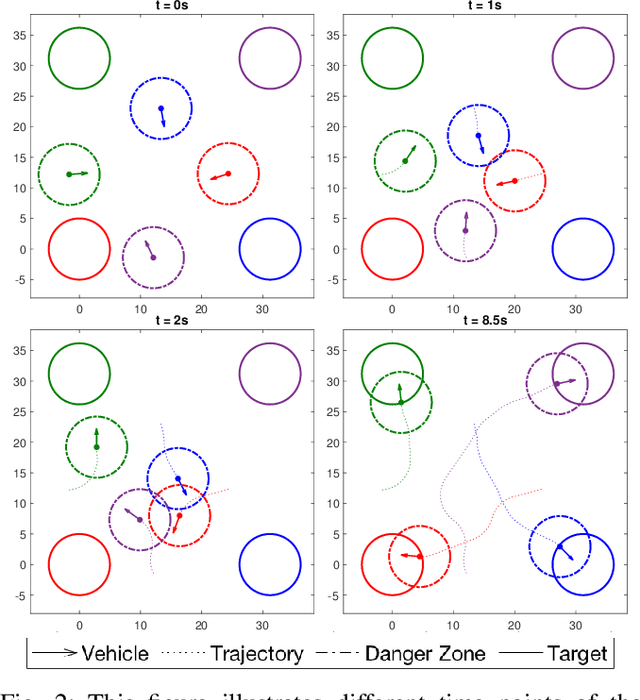
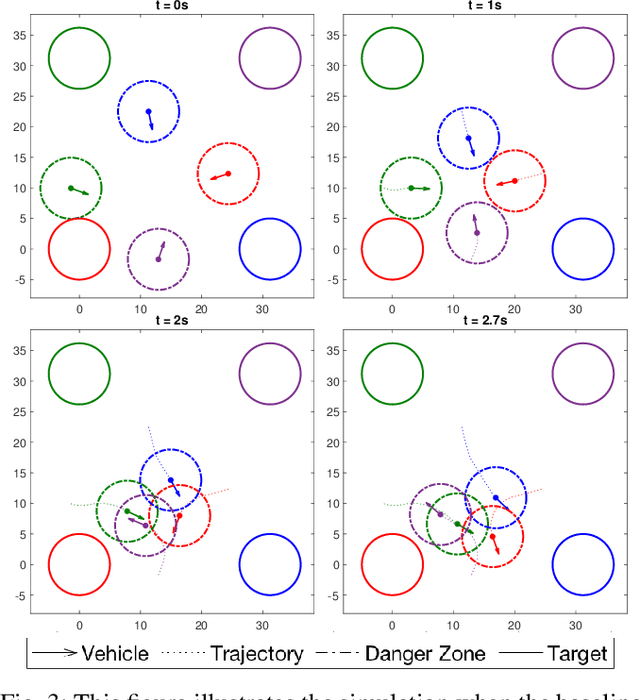
Recently there have been a lot of interests in introducing UAVs for a wide range of applications, making ensuring safety of multi-vehicle systems a highly crucial problem. Hamilton-Jacobi (HJ) reachability is a promising tool for analyzing safety of vehicles for low-dimensional systems. However, reachability suffers from the curse of dimensionality, making its direct application to more than two vehicles intractable. Recent works have made it tractable to guarantee safety for 3 and 4 vehicles with reachability. However, the number of vehicles safety can be guaranteed for remains small. In this paper, we propose a novel reachability-based approach that guarantees safety for any number of vehicles while vehicles complete their objectives of visiting multiple targets efficiently, given any K-vehicle collision avoidance algorithm where K can in general be a small number. We achieve this by developing an approach to group vehicles into clusters efficiently and a control strategy that guarantees safety for any in-cluster and cross-cluster pair of vehicles for all time. Our proposed method is scalable to large number of vehicles with little computation overhead. We demonstrate our proposed approach with a simulation on 15 vehicles. In addition, we contribute a more general solution to the 3-vehicle collision avoidance problem from a past recent work, show that the prior work is a special case of our proposed generalization, and prove its validity.