Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBody Gesture Recognition to Control a Social Robot
Jun 15, 2022

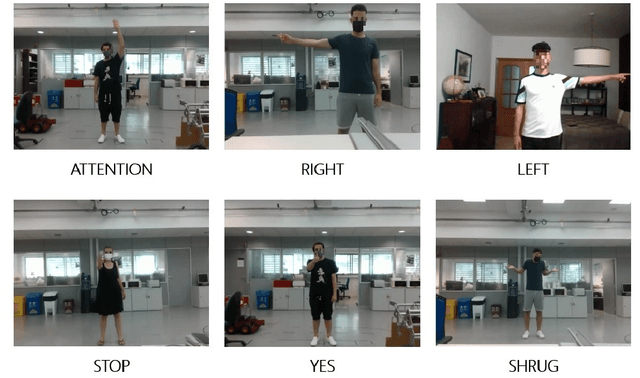

In this work, we propose a gesture based language to allow humans to interact with robots using their body in a natural way. We have created a new gesture detection model using neural networks and a custom dataset of humans performing a set of body gestures to train our network. Furthermore, we compare body gesture communication with other communication channels to acknowledge the importance of adding this knowledge to robots. The presented approach is extensively validated in diverse simulations and real-life experiments with non-trained volunteers. This attains remarkable results and shows that it is a valuable framework for social robotics applications, such as human robot collaboration or human-robot interaction.
Via