 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChallenges in Hyperspectral Imaging for Autonomous Driving: The HSI-Drive Case
Mar 26, 2026The use of hyperspectral imaging (HSI) in autonomous driving (AD), while promising, faces many challenges related to the specifics and requirements of this application domain. On the one hand, non-controlled and variable lighting conditions, the wide depth-of-field ranges, and dynamic scenes with fast-moving objects. On the other hand, the requirements for real-time operation and the limited computational resources of embedded platforms. The combination of these factors determines both the criteria for selecting appropriate HSI technologies and the development of custom vision algorithms that leverage the spectral and spatial information obtained from the sensors. In this article, we analyse several techniques explored in the research of HSI-based vision systems with application to AD, using as an example results obtained from experiments using data from the most recent version of the HSI-Drive dataset.
Optimization of DNN-based HSI Segmentation FPGA-based SoC for ADS: A Practical Approach
Jul 22, 2025The use of HSI for autonomous navigation is a promising research field aimed at improving the accuracy and robustness of detection, tracking, and scene understanding systems based on vision sensors. Combining advanced computer algorithms, such as DNNs, with small-size snapshot HSI cameras enhances the reliability of these systems. HSI overcomes intrinsic limitations of greyscale and RGB imaging in depicting physical properties of targets, particularly regarding spectral reflectance and metamerism. Despite promising results in HSI-based vision developments, safety-critical systems like ADS demand strict constraints on latency, resource consumption, and security, motivating the shift of ML workloads to edge platforms. This involves a thorough software/hardware co-design scheme to distribute and optimize the tasks efficiently among the limited resources of computing platforms. With respect to inference, the over-parameterized nature of DNNs poses significant computational challenges for real-time on-the-edge deployment. In addition, the intensive data preprocessing required by HSI, which is frequently overlooked, must be carefully managed in terms of memory arrangement and inter-task communication to enable an efficient integrated pipeline design on a SoC. This work presents a set of optimization techniques for the practical co-design of a DNN-based HSI segmentation processor deployed on a FPGA-based SoC targeted at ADS, including key optimizations such as functional software/hardware task distribution, hardware-aware preprocessing, ML model compression, and a complete pipelined deployment. Applied compression techniques significantly reduce the complexity of the designed DNN to 24.34% of the original operations and to 1.02% of the original number of parameters, achieving a 2.86x speed-up in the inference task without noticeable degradation of the segmentation accuracy.
Balancing Robustness and Efficiency in Embedded DNNs Through Activation Function Selection
Apr 07, 2025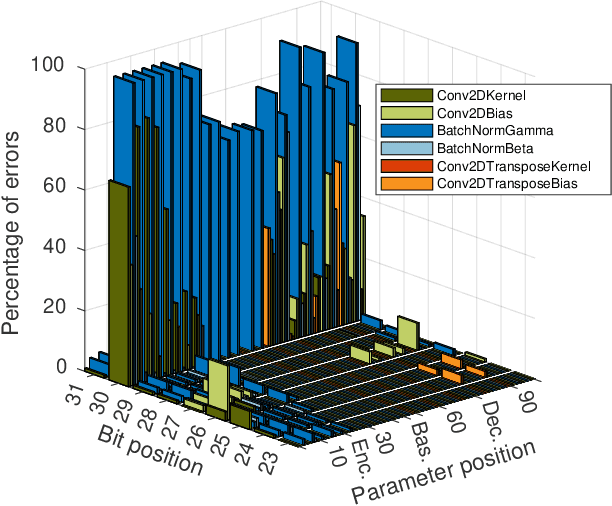
Machine learning-based embedded systems for safety-critical applications, such as aerospace and autonomous driving, must be robust to perturbations caused by soft errors. As transistor geometries shrink and voltages decrease, modern electronic devices become more susceptible to background radiation, increasing the concern about failures produced by soft errors. The resilience of deep neural networks (DNNs) to these errors depends not only on target device technology but also on model structure and the numerical representation and arithmetic precision of their parameters. Compression techniques like pruning and quantization, used to reduce memory footprint and computational complexity, alter both model structure and representation, affecting soft error robustness. In this regard, although often overlooked, the choice of activation functions (AFs) impacts not only accuracy and trainability but also compressibility and error resilience. This paper explores the use of bounded AFs to enhance robustness against parameter perturbations, while evaluating their effects on model accuracy, compressibility, and computational load with a technology-agnostic approach. We focus on encoder-decoder convolutional models developed for semantic segmentation of hyperspectral images with application to autonomous driving systems. Experiments are conducted on an AMD-Xilinx's KV260 SoM.
Reliable Explainability of Deep Learning Spatial-Spectral Classifiers for Improved Semantic Segmentation in Autonomous Driving
Feb 20, 2025Integrating hyperspectral imagery (HSI) with deep neural networks (DNNs) can strengthen the accuracy of intelligent vision systems by combining spectral and spatial information, which is useful for tasks like semantic segmentation in autonomous driving. To advance research in such safety-critical systems, determining the precise contribution of spectral information to complex DNNs' output is needed. To address this, several saliency methods, such as class activation maps (CAM), have been proposed primarily for image classification. However, recent studies have raised concerns regarding their reliability. In this paper, we address their limitations and propose an alternative approach by leveraging the data provided by activations and weights from relevant DNN layers to better capture the relationship between input features and predictions. The study aims to assess the superior performance of HSI compared to 3-channel and single-channel DNNs. We also address the influence of spectral signature normalization for enhancing DNN robustness in real-world driving conditions.
Exploring Fully Convolutional Networks for the Segmentation of Hyperspectral Imaging Applied to Advanced Driver Assistance Systems
Dec 05, 2024Advanced Driver Assistance Systems (ADAS) are designed with the main purpose of increasing the safety and comfort of vehicle occupants. Most of current computer vision-based ADAS perform detection and tracking tasks quite successfully under regular conditions, but are not completely reliable, particularly under adverse weather and changing lighting conditions, neither in complex situations with many overlapping objects. In this work we explore the use of hyperspectral imaging (HSI) in ADAS on the assumption that the distinct near infrared (NIR) spectral reflectances of different materials can help to better separate the objects in a driving scene. In particular, this paper describes some experimental results of the application of fully convolutional networks (FCN) to the image segmentation of HSI for ADAS applications. More specifically, our aim is to investigate to what extent the spatial features codified by convolutional filters can be helpful to improve the performance of HSI segmentation systems. With that aim, we use the HSI-Drive v1.1 dataset, which provides a set of labelled images recorded in real driving conditions with a small-size snapshot NIR-HSI camera. Finally, we analyze the implementability of such a HSI segmentation system by prototyping the developed FCN model together with the necessary hyperspectral cube preprocessing stage and characterizing its performance on an MPSoC.
* arXiv admin note: text overlap with arXiv:2411.19274
Evaluating Single Event Upsets in Deep Neural Networks for Semantic Segmentation: an embedded system perspective
Dec 04, 2024



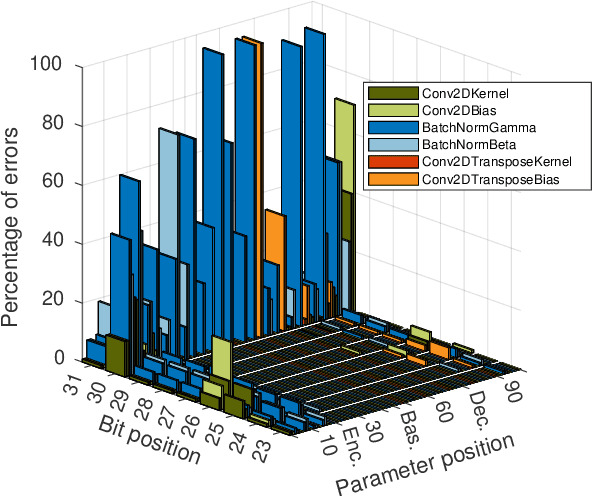
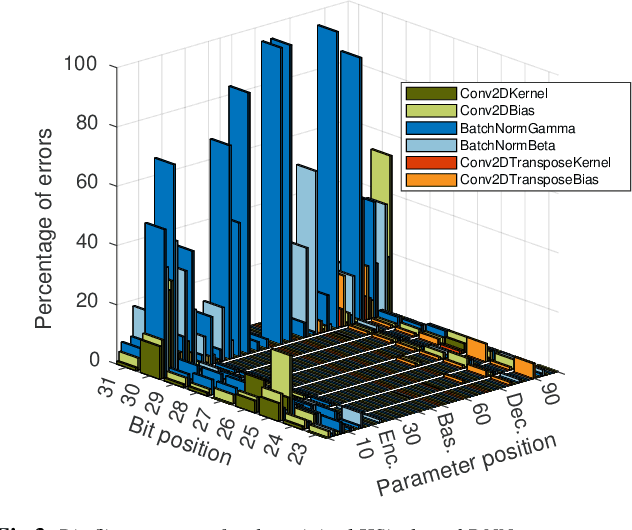
As the deployment of artifical intelligence (AI) algorithms at edge devices becomes increasingly prevalent, enhancing the robustness and reliability of autonomous AI-based perception and decision systems is becoming as relevant as precision and performance, especially in applications areas considered safety-critical such as autonomous driving and aerospace. This paper delves into the robustness assessment in embedded Deep Neural Networks (DNNs), particularly focusing on the impact of parameter perturbations produced by single event upsets (SEUs) on convolutional neural networks (CNN) for image semantic segmentation. By scrutinizing the layer-by-layer and bit-by-bit sensitivity of various encoder-decoder models to soft errors, this study thoroughly investigates the vulnerability of segmentation DNNs to SEUs and evaluates the consequences of techniques like model pruning and parameter quantization on the robustness of compressed models aimed at embedded implementations. The findings offer valuable insights into the mechanisms underlying SEU-induced failures that allow for evaluating the robustness of DNNs once trained in advance. Moreover, based on the collected data, we propose a set of practical lightweight error mitigation techniques with no memory or computational cost suitable for resource-constrained deployments. The code used to perform the fault injection (FI) campaign is available at https://github.com/jonGuti13/TensorFI2 , while the code to implement proposed techniques is available at https://github.com/jonGuti13/parameterProtection .
Designing DNNs for a trade-off between robustness and processing performance in embedded devices
Dec 04, 2024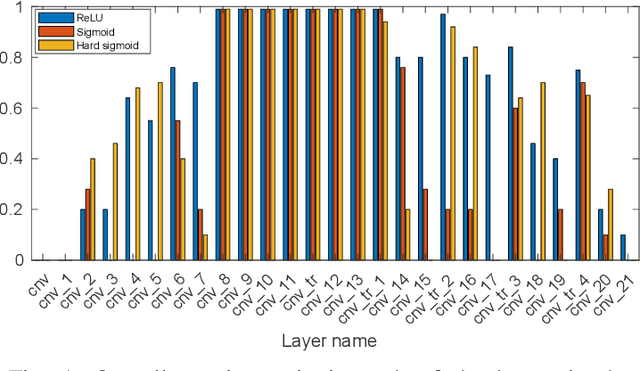
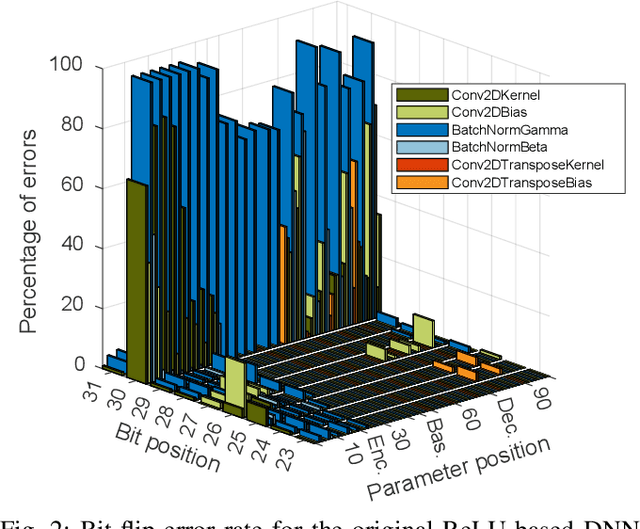
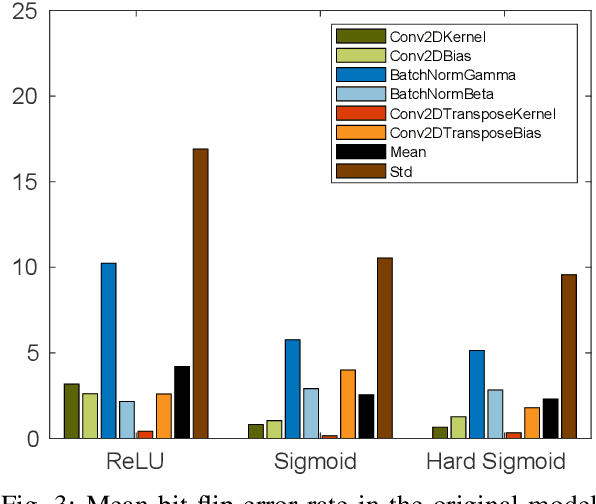
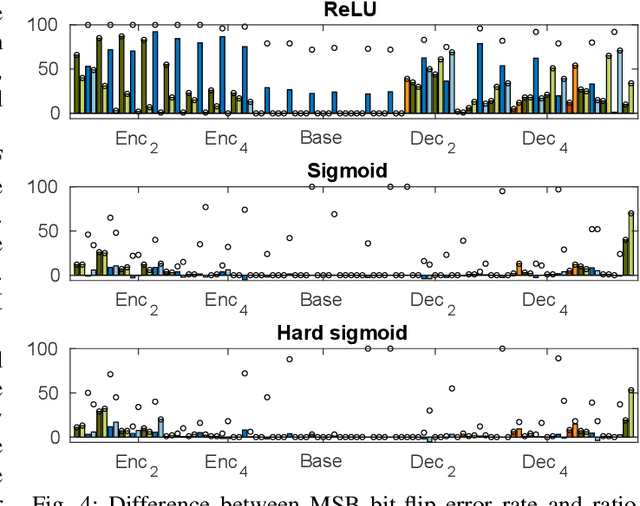
Machine learning-based embedded systems employed in safety-critical applications such as aerospace and autonomous driving need to be robust against perturbations produced by soft errors. Soft errors are an increasing concern in modern digital processors since smaller transistor geometries and lower voltages give electronic devices a higher sensitivity to background radiation. The resilience of deep neural network (DNN) models to perturbations in their parameters is determined, to a large extent, by the structure of the model itself, and also by the selected numerical representation and used arithmetic precision. When compression techniques such as model pruning and model quantization are applied to reduce memory footprint and computational complexity for deployment, both model structure and numerical representation are modified and thus, soft error robustness also changes. In this sense, although the choice of activation functions (AFs) in DNN models is frequently ignored, it conditions not only their accuracy and trainability, but also compressibility rates and numerical robustness. This paper investigates the suitability of using bounded AFs to improve model robustness against DNN parameter perturbations, assessing at the same time the impact of this choice on deployment in terms of model accuracy, compressibility, and computational burden. In particular, we analyze encoder-decoder fully convolutional models aimed at performing semantic segmentation tasks on hyperspectral images for scene understanding in autonomous driving. Deployment characterization is performed experimentally on an AMD-Xilinx's KV260 SoM.
On-chip Hyperspectral Image Segmentation with Fully Convolutional Networks for Scene Understanding in Autonomous Driving
Nov 28, 2024Most of current computer vision-based advanced driver assistance systems (ADAS) perform detection and tracking of objects quite successfully under regular conditions. However, under adverse weather and changing lighting conditions, and in complex situations with many overlapping objects, these systems are not completely reliable. The spectral reflectance of the different objects in a driving scene beyond the visible spectrum can offer additional information to increase the reliability of these systems, especially under challenging driving conditions. Furthermore, this information may be significant enough to develop vision systems that allow for a better understanding and interpretation of the whole driving scene. In this work we explore the use of snapshot, video-rate hyperspectral imaging (HSI) cameras in ADAS on the assumption that the near infrared (NIR) spectral reflectance of different materials can help to better segment the objects in real driving scenarios. To do this, we have used the HSI-Drive 1.1 dataset to perform various experiments on spectral classification algorithms. However, the information retrieval of hyperspectral recordings in natural outdoor scenarios is challenging, mainly because of deficient colour constancy and other inherent shortcomings of current snapshot HSI technology, which poses some limitations to the development of pure spectral classifiers. In consequence, in this work we analyze to what extent the spatial features codified by standard, tiny fully convolutional network (FCN) models can improve the performance of HSI segmentation systems for ADAS applications. The abstract above is truncated due to submission limits. For the full abstract, please refer to the published article.
Rapid Deployment of Domain-specific Hyperspectral Image Processors with Application to Autonomous Driving
Nov 26, 2024



The article discusses the use of low cost System-On-Module (SOM) platforms for the implementation of efficient hyperspectral imaging (HSI) processors for application in autonomous driving. The work addresses the challenges of shaping and deploying multiple layer fully convolutional networks (FCN) for low-latency, on-board image semantic segmentation using resource- and power-constrained processing devices. The paper describes in detail the steps followed to redesign and customize a successfully trained HSI segmentation lightweight FCN that was previously tested on a high-end heterogeneous multiprocessing system-on-chip (MPSoC) to accommodate it to the constraints imposed by a low-cost SOM. This SOM features a lower-end but much cheaper MPSoC suitable for the deployment of automatic driving systems (ADS). In particular the article reports the data- and hardware-specific quantization techniques utilized to fit the FCN into a commercial fixed-point programmable AI coprocessor IP, and proposes a full customized post-training quantization scheme to reduce computation and storage costs without compromising segmentation accuracy.
HSI-Drive v2.0: More Data for New Challenges in Scene Understanding for Autonomous Driving
Nov 26, 2024We present the updated version of the HSI-Drive dataset aimed at developing automated driving systems (ADS) using hyperspectral imaging (HSI). The v2.0 version includes new annotated images from videos recorded during winter and fall in real driving scenarios. Added to the spring and summer images included in the previous v1.1 version, the new dataset contains 752 images covering the four seasons. In this paper, we show the improvements achieved over previously published results obtained on the v1.1 dataset, showcasing the enhanced performance of models trained on the new v2.0 dataset. We also show the progress made in comprehensive scene understanding by experimenting with more capable image segmentation models. These models include new segmentation categories aimed at the identification of essential road safety objects such as the presence of vehicles and road signs, as well as highly vulnerable groups like pedestrians and cyclists. In addition, we provide evidence of the performance and robustness of the models when applied to segmenting HSI video sequences captured in various environments and conditions. Finally, for a correct assessment of the results described in this work, the constraints imposed by the processing platforms that can sensibly be deployed in vehicles for ADS must be taken into account. Thus, and although implementation details are out of the scope of this paper, we focus our research on the development of computationally efficient, lightweight ML models that can eventually operate at high throughput rates. The dataset and some examples of segmented videos are available in https://ipaccess.ehu.eus/HSI-Drive/.