 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Intelligent System-on-a-Chip for a Real-Time Assessment of Fuel Consumption to Promote Eco-Driving
Jan 29, 2025



Pollution that originates from automobiles is a concern in the current world, not only because of global warming, but also due to the harmful effects on people's health and lives. Despite regulations on exhaust gas emissions being applied, minimizing unsuitable driving habits that cause elevated fuel consumption and emissions would achieve further reductions. For that reason, this work proposes a self-organized map (SOM)-based intelligent system in order to provide drivers with eco-driving-intended driving style (DS) recommendations. The development of the DS advisor uses driving data from the Uyanik instrumented car. The system classifies drivers regarding the underlying causes of non-optimal DSs from the eco-driving viewpoint. When compared with other solutions, the main advantage of this approach is the personalization of the recommendations that are provided to motorists, comprising the handling of the pedals and the gearbox, with potential improvements in both fuel consumption and emissions ranging from the 9.5\% to the 31.5\%, or even higher for drivers that are strongly engaged with the system. It was successfully implemented using a field-programmable gate array (FPGA) device of the Xilinx ZynQ programmable system-on-a-chip (PSoC) family. This SOM-based system allows for real-time implementation, state-of-the-art timing performances, and low power consumption, which are suitable for developing advanced driving assistance systems (ADASs).
Analysis of the Motion Sickness and the Lack of Comfort in Car Passengers
Jan 29, 2025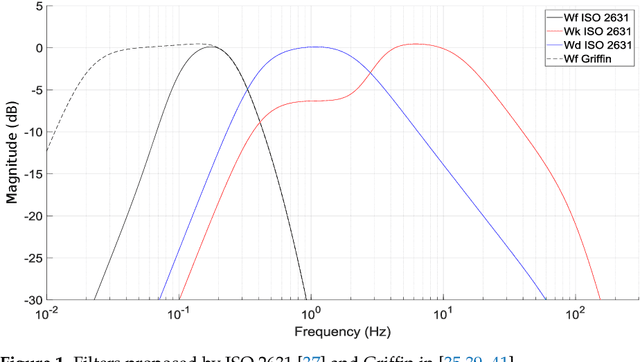
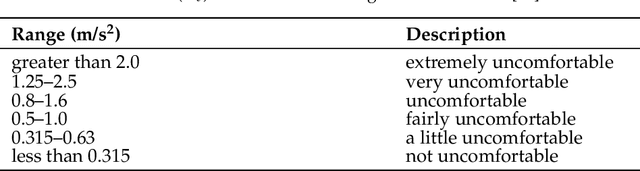


Advanced driving assistance systems (ADAS) are primarily designed to increase driving safety and reduce traffic congestion without paying too much attention to passenger comfort or motion sickness. However, in view of autonomous cars, and taking into account that the lack of comfort and motion sickness increase in passengers, analysis from a comfort perspective is essential in the future car investigation. The aim of this work is to study in detail how passenger's comfort evaluation parameters vary depending on the driving style, car or road. The database used has been developed by compiling the accelerations suffered by passengers when three drivers cruise two different vehicles on different types of routes. In order to evaluate both comfort and motion sickness, first, the numerical values of the main comfort evaluation variables reported in the literature have been analyzed. Moreover, a complementary statistical analysis of probability density and a power spectral analysis are performed. Finally, quantitative results are compared with passenger qualitative feedback. The results show the high dependence of comfort evaluation variables' value with the road type. In addition, it has been demonstrated that the driving style and vehicle dynamics amplify or attenuate those values. Additionally, it has been demonstrated that contributions from longitudinal and lateral accelerations have a much greater effect in the lack of comfort than vertical ones. Finally, based on the concrete results obtained, a new experimental campaign is proposed.
An eco-driving approach for ride comfort improvement
Jan 29, 2025



New challenges on transport systems are emerging due to the advances that the current paradigm is experiencing. The breakthrough of the autonomous car brings concerns about ride comfort, while the pollution concerns have arisen in recent years. In the model of automated automobiles, drivers are expected to become passengers, so, they will be more prone to suffer from ride discomfort or motion sickness. Conversely, the eco-driving implications should not be set aside because of the influence of pollution on climate and people's health. For that reason, a joint assessment of the aforementioned points would have a positive impact. Thus, this work presents a self-organised map-based solution to assess ride comfort features of individuals considering their driving style from the viewpoint of eco-driving. For this purpose, a previously acquired dataset from an instrumented car was used to classify drivers regarding the causes of their lack of ride comfort and eco-friendliness. Once drivers are classified regarding their driving style, natural-language-based recommendations are proposed to increase the engagement with the system. Hence, potential improvements of up to the 57.7% for ride comfort evaluation parameters, as well as up to the 47.1% in greenhouse-gasses emissions are expected to be reached.
An FPGA-Based Neuro-Fuzzy Sensor for Personalized Driving Assistance
Jan 27, 2025Advanced driving-assistance systems (ADAS) are intended to automatize driver tasks, as well as improve driving and vehicle safety. This work proposes an intelligent neuro-fuzzy sensor for driving style (DS) recognition, suitable for ADAS enhancement. The development of the driving style intelligent sensor uses naturalistic driving data from the SHRP2 study, which includes data from a CAN bus, inertial measurement unit, and front radar. The system has been successfully implemented using a field-programmable gate array (FPGA) device of the Xilinx Zynq programmable system-on-chip (PSoC). It can mimic the typical timing parameters of a group of drivers as well as tune these typical parameters to model individual DSs. The neuro-fuzzy intelligent sensor provides high-speed real-time active ADAS implementation and is able to personalize its behavior into safe margins without driver intervention. In particular, the personalization procedure of the time headway (THW) parameter for an ACC in steady car following was developed, achieving a performance of 0.53 microseconds. This performance fulfilled the requirements of cutting-edge active ADAS specifications.
* Journal Article
Rapid Deployment of Domain-specific Hyperspectral Image Processors with Application to Autonomous Driving
Nov 26, 2024



The article discusses the use of low cost System-On-Module (SOM) platforms for the implementation of efficient hyperspectral imaging (HSI) processors for application in autonomous driving. The work addresses the challenges of shaping and deploying multiple layer fully convolutional networks (FCN) for low-latency, on-board image semantic segmentation using resource- and power-constrained processing devices. The paper describes in detail the steps followed to redesign and customize a successfully trained HSI segmentation lightweight FCN that was previously tested on a high-end heterogeneous multiprocessing system-on-chip (MPSoC) to accommodate it to the constraints imposed by a low-cost SOM. This SOM features a lower-end but much cheaper MPSoC suitable for the deployment of automatic driving systems (ADS). In particular the article reports the data- and hardware-specific quantization techniques utilized to fit the FCN into a commercial fixed-point programmable AI coprocessor IP, and proposes a full customized post-training quantization scheme to reduce computation and storage costs without compromising segmentation accuracy.