 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRMF: A Risk Measurement Framework for Machine Learning Models
Jun 15, 2024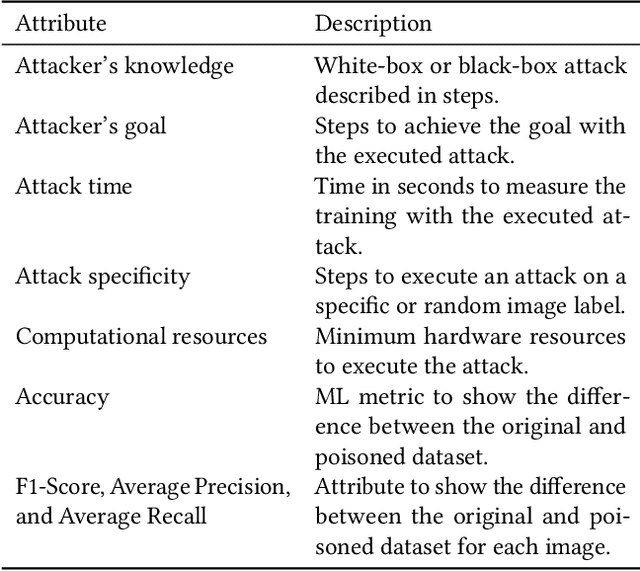
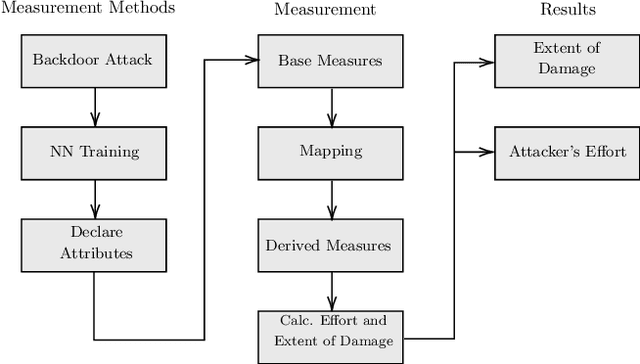
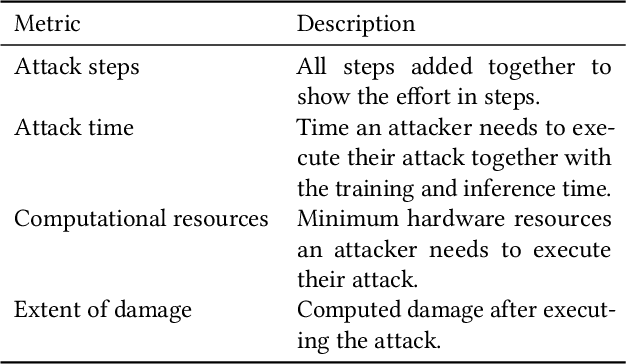
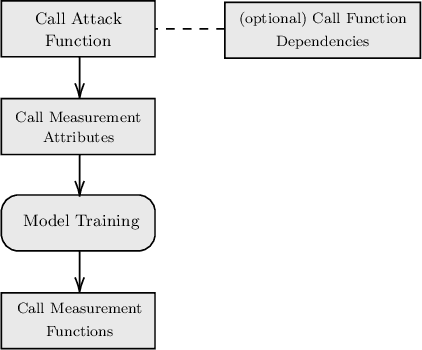
Machine learning (ML) models are used in many safety- and security-critical applications nowadays. It is therefore important to measure the security of a system that uses ML as a component. This paper focuses on the field of ML, particularly the security of autonomous vehicles. For this purpose, a technical framework will be described, implemented, and evaluated in a case study. Based on ISO/IEC 27004:2016, risk indicators are utilized to measure and evaluate the extent of damage and the effort required by an attacker. It is not possible, however, to determine a single risk value that represents the attacker's effort. Therefore, four different values must be interpreted individually.
Paving the Roadway for Safety of Automated Vehicles: An Empirical Study on Testing Challenges
May 09, 2017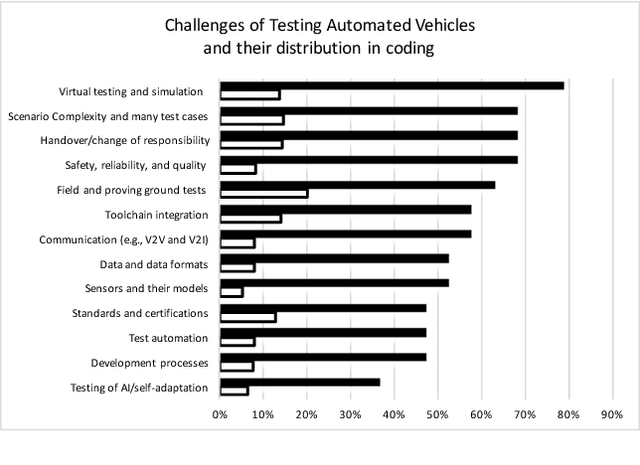



The technology in the area of automated vehicles is gaining speed and promises many advantages. However, with the recent introduction of conditionally automated driving, we have also seen accidents. Test protocols for both, conditionally automated (e.g., on highways) and automated vehicles do not exist yet and leave researchers and practitioners with different challenges. For instance, current test procedures do not suffice for fully automated vehicles, which are supposed to be completely in charge for the driving task and have no driver as a back up. This paper presents current challenges of testing the functionality and safety of automated vehicles derived from conducting focus groups and interviews with 26 participants from five countries having a background related to testing automotive safety-related topics.We provide an overview of the state-of-practice of testing active safety features as well as challenges that needs to be addressed in the future to ensure safety for automated vehicles. The major challenges identified through the interviews and focus groups, enriched by literature on this topic are related to 1) virtual testing and simulation, 2) safety, reliability, and quality, 3) sensors and sensor models, 4) required scenario complexity and amount of test cases, and 5) handover of responsibility between the driver and the vehicle.