 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Natural Gas Consumption Forecasting System for Continual Learning Scenarios based on Hoeffding Trees with Change Point Detection Mechanism
Sep 07, 2023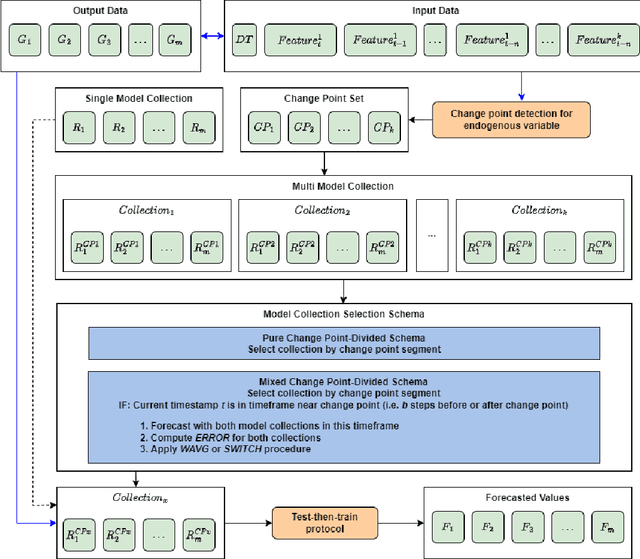

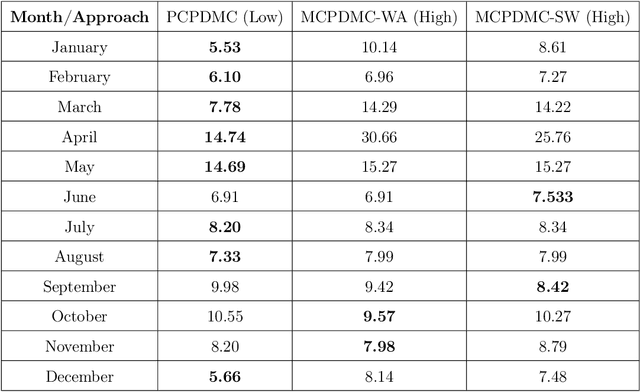
Forecasting natural gas consumption, considering seasonality and trends, is crucial in planning its supply and consumption and optimizing the cost of obtaining it, mainly by industrial entities. However, in times of threats to its supply, it is also a critical element that guarantees the supply of this raw material to meet individual consumers' needs, ensuring society's energy security. This article introduces a novel multistep ahead forecasting of natural gas consumption with change point detection integration for model collection selection with continual learning capabilities using data stream processing. The performance of the forecasting models based on the proposed approach is evaluated in a complex real-world use case of natural gas consumption forecasting. We employed Hoeffding tree predictors as forecasting models and the Pruned Exact Linear Time (PELT) algorithm for the change point detection procedure. The change point detection integration enables selecting a different model collection for successive time frames. Thus, three model collection selection procedures (with and without an error feedback loop) are defined and evaluated for forecasting scenarios with various densities of detected change points. These models were compared with change point agnostic baseline approaches. Our experiments show that fewer change points result in a lower forecasting error regardless of the model collection selection procedure employed. Also, simpler model collection selection procedures omitting forecasting error feedback leads to more robust forecasting models suitable for continual learning tasks.
Distributed Receding Horizon Control of Autonomous Convoy with Self-Interested Vehicles
Jan 21, 2021



This paper considers the problem of controlling a convoy of autonomous vehicles to be deployed on automated highways. The individual behavior of an autonomous vehicle as an intelligent self-interested decision-maker can be analyzed under a non-cooperative differential game model of the convoy. The receding horizon Nash equilibrium of the linear-quadratic differential game provides a distributed state-feedback control strategy for the convoy. This approach suffers a fundamental issue that neither the existence nor the uniqueness of a Nash equilibrium is guaranteed, so the convoy control. We present a relative dynamics based model of the convoy that carries all the features of the individual dynamics based game model. We show that the relative dynamics model guarantees the existence of the convoy control as well as the asymptotic stability of the closed-loop system. Simulations illustrate the effectiveness of the presented convoy control scheme.