 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Hand Pose Detection in Egocentric RGB-D Images
Nov 29, 2014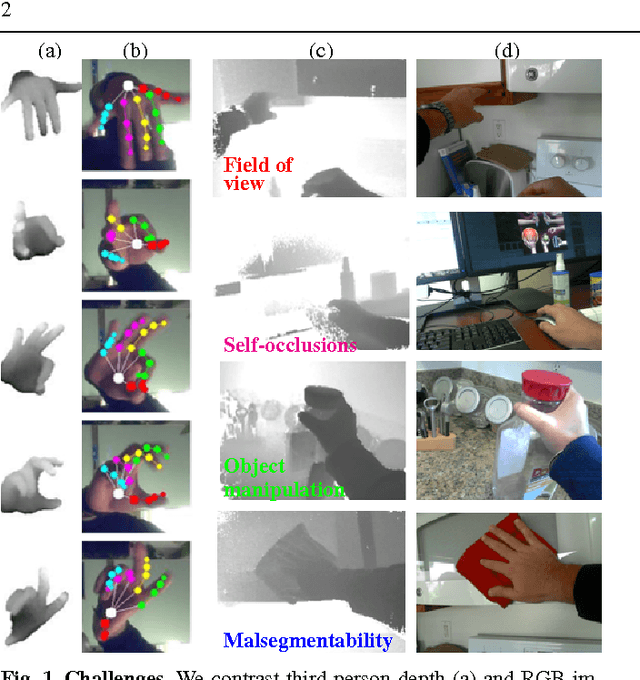
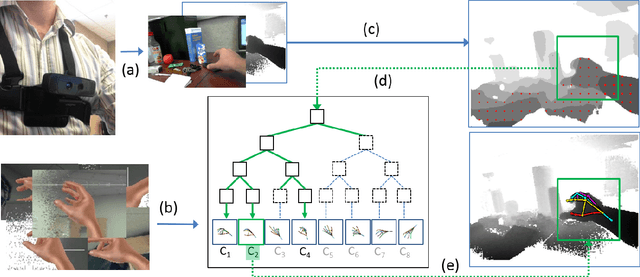
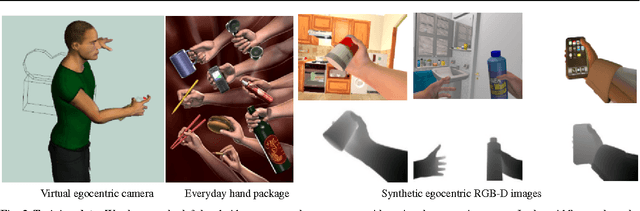
We focus on the task of everyday hand pose estimation from egocentric viewpoints. For this task, we show that depth sensors are particularly informative for extracting near-field interactions of the camera wearer with his/her environment. Despite the recent advances in full-body pose estimation using Kinect-like sensors, reliable monocular hand pose estimation in RGB-D images is still an unsolved problem. The problem is considerably exacerbated when analyzing hands performing daily activities from a first-person viewpoint, due to severe occlusions arising from object manipulations and a limited field-of-view. Our system addresses these difficulties by exploiting strong priors over viewpoint and pose in a discriminative tracking-by-detection framework. Our priors are operationalized through a photorealistic synthetic model of egocentric scenes, which is used to generate training data for learning depth-based pose classifiers. We evaluate our approach on an annotated dataset of real egocentric object manipulation scenes and compare to both commercial and academic approaches. Our method provides state-of-the-art performance for both hand detection and pose estimation in egocentric RGB-D images.
Egocentric Pose Recognition in Four Lines of Code
Nov 29, 2014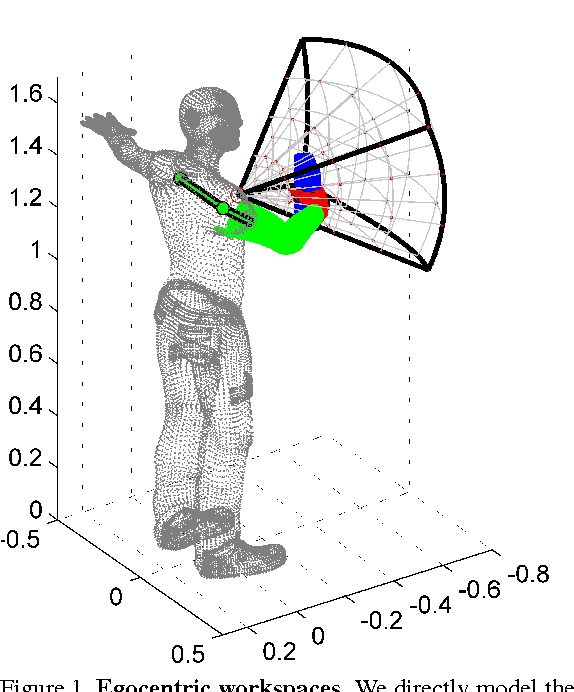

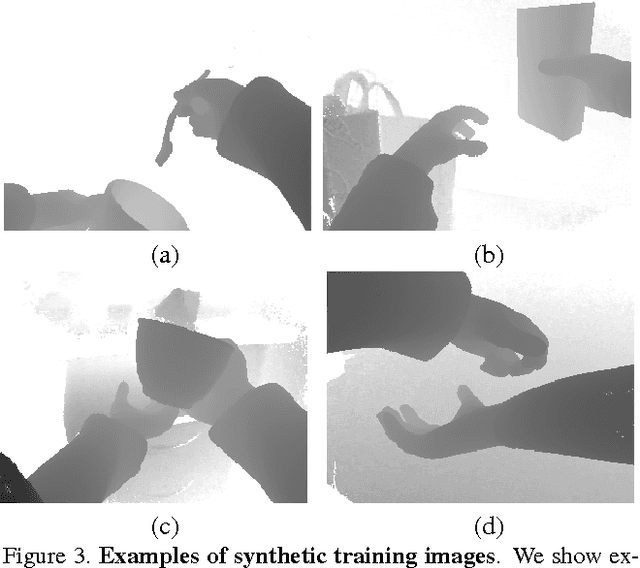

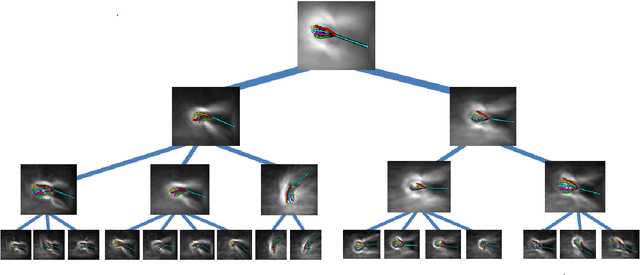
We tackle the problem of estimating the 3D pose of an individual's upper limbs (arms+hands) from a chest mounted depth-camera. Importantly, we consider pose estimation during everyday interactions with objects. Past work shows that strong pose+viewpoint priors and depth-based features are crucial for robust performance. In egocentric views, hands and arms are observable within a well defined volume in front of the camera. We call this volume an egocentric workspace. A notable property is that hand appearance correlates with workspace location. To exploit this correlation, we classify arm+hand configurations in a global egocentric coordinate frame, rather than a local scanning window. This greatly simplify the architecture and improves performance. We propose an efficient pipeline which 1) generates synthetic workspace exemplars for training using a virtual chest-mounted camera whose intrinsic parameters match our physical camera, 2) computes perspective-aware depth features on this entire volume and 3) recognizes discrete arm+hand pose classes through a sparse multi-class SVM. Our method provides state-of-the-art hand pose recognition performance from egocentric RGB-D images in real-time.