 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Predict the 3D Layout of a Scene
Nov 19, 2020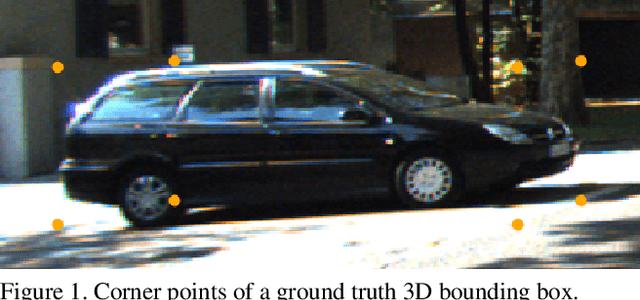
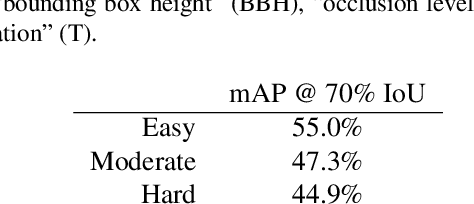
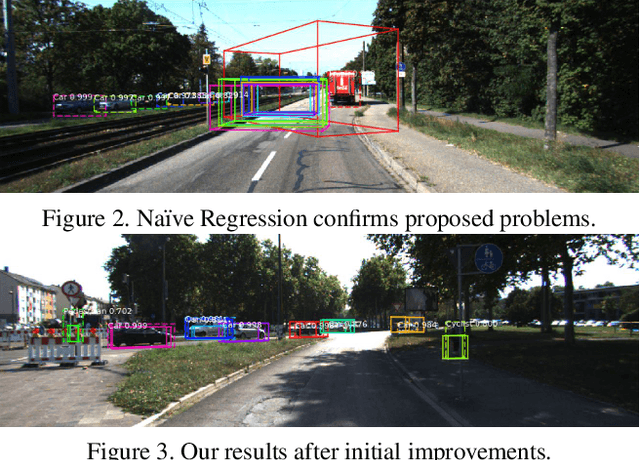

While 2D object detection has improved significantly over the past, real world applications of computer vision often require an understanding of the 3D layout of a scene. Many recent approaches to 3D detection use LiDAR point clouds for prediction. We propose a method that only uses a single RGB image, thus enabling applications in devices or vehicles that do not have LiDAR sensors. By using an RGB image, we can leverage the maturity and success of recent 2D object detectors, by extending a 2D detector with a 3D detection head. In this paper we discuss different approaches and experiments, including both regression and classification methods, for designing this 3D detection head. Furthermore, we evaluate how subproblems and implementation details impact the overall prediction result. We use the KITTI dataset for training, which consists of street traffic scenes with class labels, 2D bounding boxes and 3D annotations with seven degrees of freedom. Our final architecture is based on Faster R-CNN. The outputs of the convolutional backbone are fixed sized feature maps for every region of interest. Fully connected layers within the network head then propose an object class and perform 2D bounding box regression. We extend the network head by a 3D detection head, which predicts every degree of freedom of a 3D bounding box via classification. We achieve a mean average precision of 47.3% for moderately difficult data, measured at a 3D intersection over union threshold of 70%, as required by the official KITTI benchmark; outperforming previous state-of-the-art single RGB only methods by a large margin.