 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Optimal Trajectory Tracking Control Applied to a Large-Scale Ball-on-Plate System
Oct 26, 2020
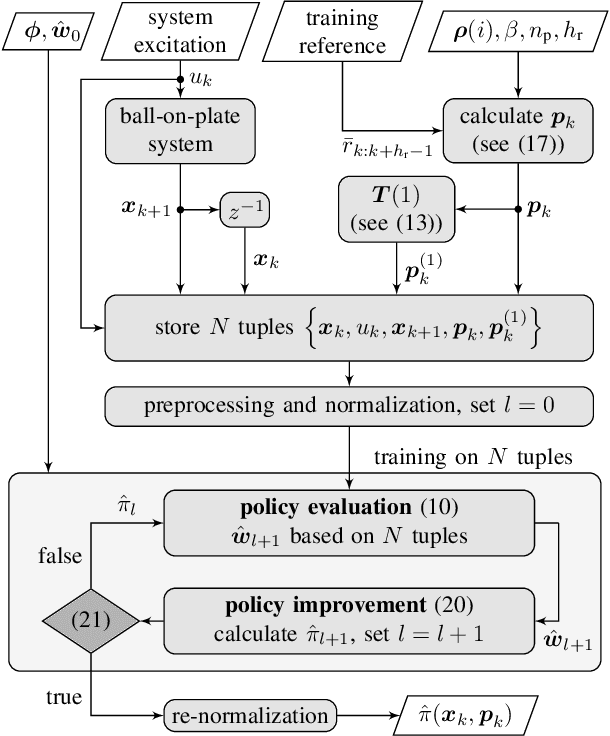
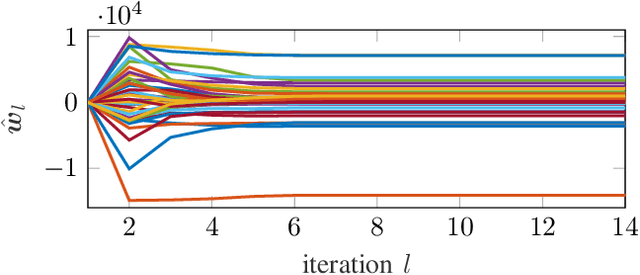
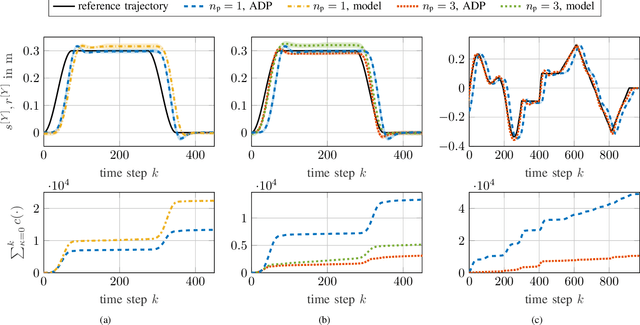
While many theoretical works concerning Adaptive Dynamic Programming (ADP) have been proposed, application results are scarce. Therefore, we design an ADP-based optimal trajectory tracking controller and apply it to a large-scale ball-on-plate system. Our proposed method incorporates an approximated reference trajectory instead of using setpoint tracking and allows to automatically compensate for constant offset terms. Due to the off-policy characteristics of the algorithm, the method requires only a small amount of measured data to train the controller. Our experimental results show that this tracking mechanism significantly reduces the control cost compared to setpoint controllers. Furthermore, a comparison with a model-based optimal controller highlights the benefits of our model-free data-based ADP tracking controller, where no system model and manual tuning are required but the controller is tuned automatically using measured data.
Multi-Robot Task Allocation and Scheduling Considering Cooperative Tasks and Precedence Constraints
May 08, 2020
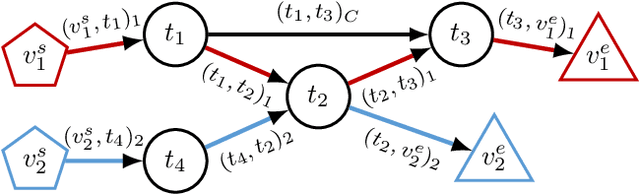
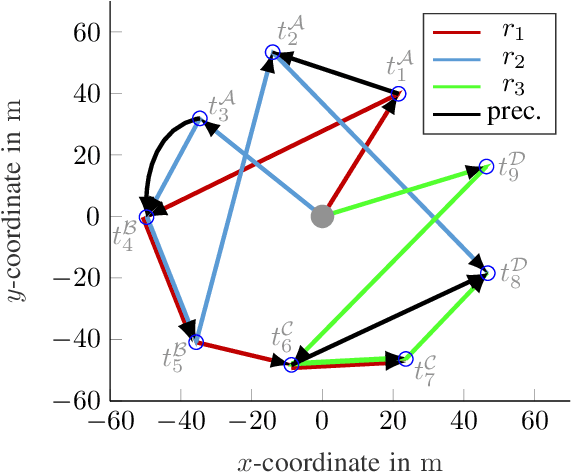
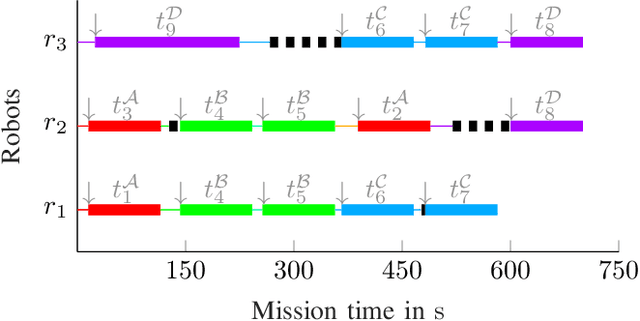
In order to fully exploit the advantages inherent to cooperating heterogeneous multi-robot teams, sophisticated coordination algorithms are essential. Time-extended multi-robot task allocation approaches assign and schedule a set of tasks to a group of robots such that certain objectives are optimized and operational constraints are met. This is particularly challenging if cooperative tasks, i.e. tasks that require two or more robots to work directly together, are considered. In this paper, we present an easy-to-implement criterion to validate the feasibility, i.e. executability, of solutions to time-extended multi-robot task allocation problems with cross schedule dependencies arising from the consideration of cooperative tasks and precedence constraints. Using the introduced feasibility criterion, we propose a local improvement heuristic based on a neighborhood operator for the problem class under consideration. The initial solution is obtained by a greedy constructive heuristic. Both methods use a generalized cost structure and are therefore able to handle various objective function instances. We evaluate the proposed approach using test scenarios of different problem sizes, all comprising the complexity aspects of the regarded problem. The simulation results illustrate the improvement potential arising from the application of the local improvement heuristic.