 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Optimal Trajectory Tracking Control Applied to a Large-Scale Ball-on-Plate System
Paper and Code
Oct 26, 2020
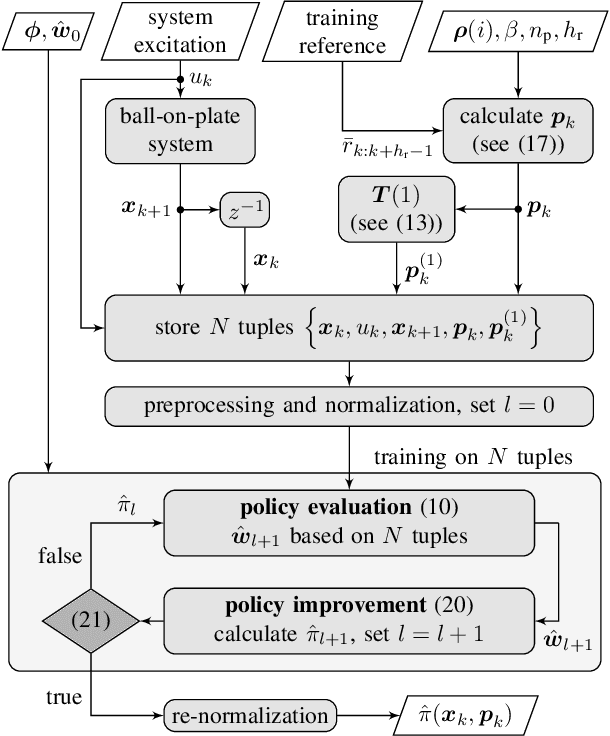
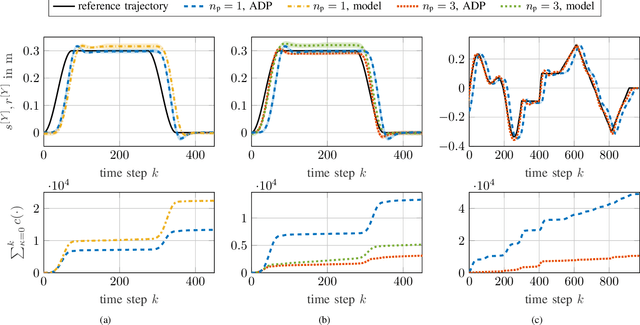
While many theoretical works concerning Adaptive Dynamic Programming (ADP) have been proposed, application results are scarce. Therefore, we design an ADP-based optimal trajectory tracking controller and apply it to a large-scale ball-on-plate system. Our proposed method incorporates an approximated reference trajectory instead of using setpoint tracking and allows to automatically compensate for constant offset terms. Due to the off-policy characteristics of the algorithm, the method requires only a small amount of measured data to train the controller. Our experimental results show that this tracking mechanism significantly reduces the control cost compared to setpoint controllers. Furthermore, a comparison with a model-based optimal controller highlights the benefits of our model-free data-based ADP tracking controller, where no system model and manual tuning are required but the controller is tuned automatically using measured data.