 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman movement augmentation and how to make it a reality
Jun 15, 2021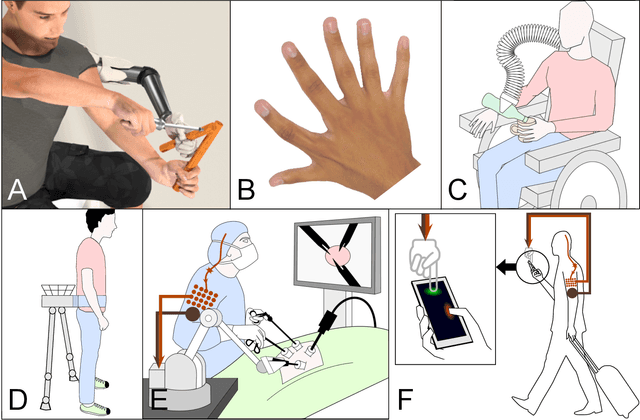
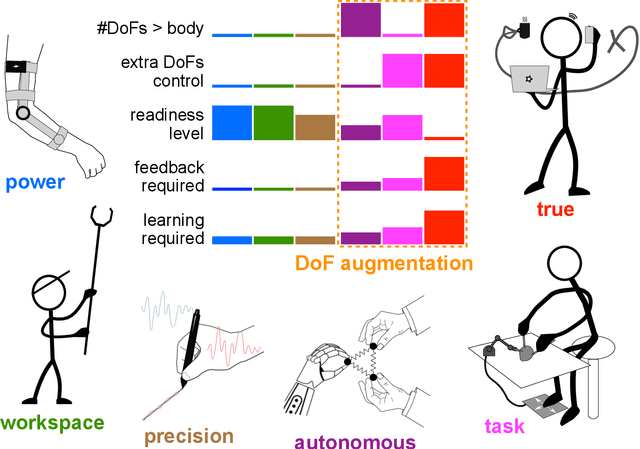
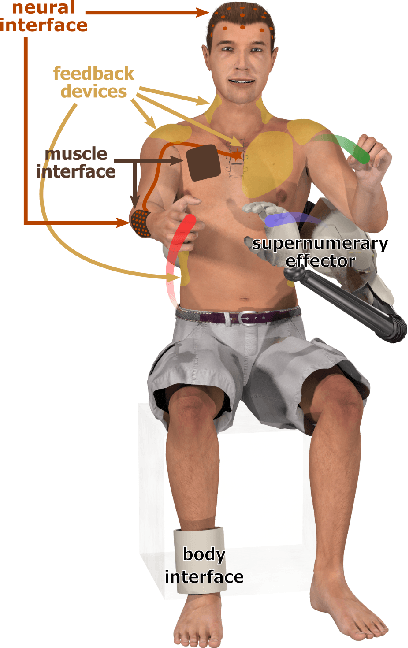

Augmenting the body with artificial limbs controlled concurrently to the natural limbs has long appeared in science fiction, but recent technological and neuroscientific advances have begun to make this vision possible. By allowing individuals to achieve otherwise impossible actions, this movement augmentation could revolutionize medical and industrial applications and profoundly change the way humans interact with their environment. Here, we construct a movement augmentation taxonomy through what is augmented and how it is achieved. With this framework, we analyze augmentation that extends the number of degrees-of-freedom, discuss critical features of effective augmentation such as physiological control signals, sensory feedback and learning, and propose a vision for the field.