Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Planning by Reinforcement Learning for an Unmanned Aerial Vehicle in Virtual Open Space with Static Obstacles
Sep 24, 2020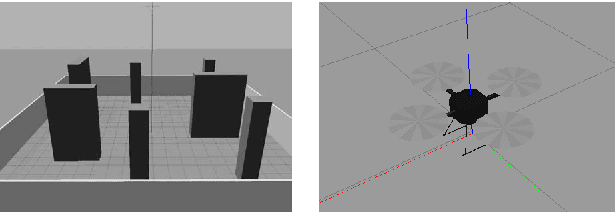
In this study, we applied reinforcement learning based on the proximal policy optimization algorithm to perform motion planning for an unmanned aerial vehicle (UAV) in an open space with static obstacles. The application of reinforcement learning through a real UAV has several limitations such as time and cost; thus, we used the Gazebo simulator to train a virtual quadrotor UAV in a virtual environment. As the reinforcement learning progressed, the mean reward and goal rate of the model were increased. Furthermore, the test of the trained model shows that the UAV reaches the goal with an 81% goal rate using the simple reward function suggested in this work.
* Submitted to ICCAS 2020
Via