 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeeStonefish-scenes: A synthetically generated dataset for underwater event-based optical flow prediction tasks
May 19, 2025The combined use of event-based vision and Spiking Neural Networks (SNNs) is expected to significantly impact robotics, particularly in tasks like visual odometry and obstacle avoidance. While existing real-world event-based datasets for optical flow prediction, typically captured with Unmanned Aerial Vehicles (UAVs), offer valuable insights, they are limited in diversity, scalability, and are challenging to collect. Moreover, there is a notable lack of labelled datasets for underwater applications, which hinders the integration of event-based vision with Autonomous Underwater Vehicles (AUVs). To address this, synthetic datasets could provide a scalable solution while bridging the gap between simulation and reality. In this work, we introduce eStonefish-scenes, a synthetic event-based optical flow dataset based on the Stonefish simulator. Along with the dataset, we present a data generation pipeline that enables the creation of customizable underwater environments. This pipeline allows for simulating dynamic scenarios, such as biologically inspired schools of fish exhibiting realistic motion patterns, including obstacle avoidance and reactive navigation around corals. Additionally, we introduce a scene generator that can build realistic reef seabeds by randomly distributing coral across the terrain. To streamline data accessibility, we present eWiz, a comprehensive library designed for processing event-based data, offering tools for data loading, augmentation, visualization, encoding, and training data generation, along with loss functions and performance metrics.
eCARLA-scenes: A synthetically generated dataset for event-based optical flow prediction
Dec 12, 2024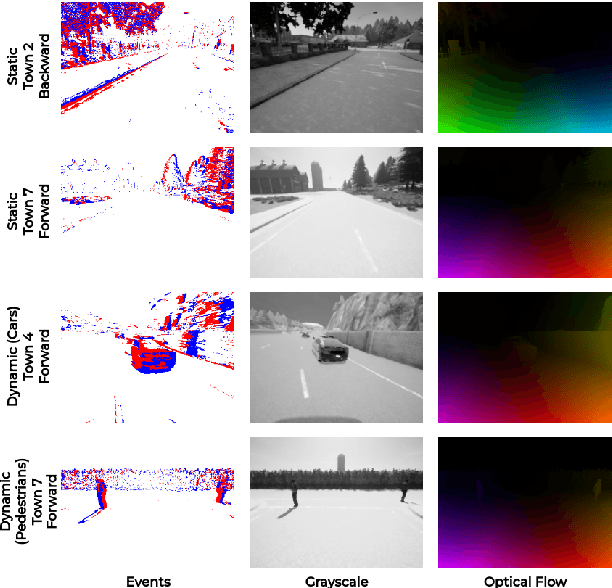
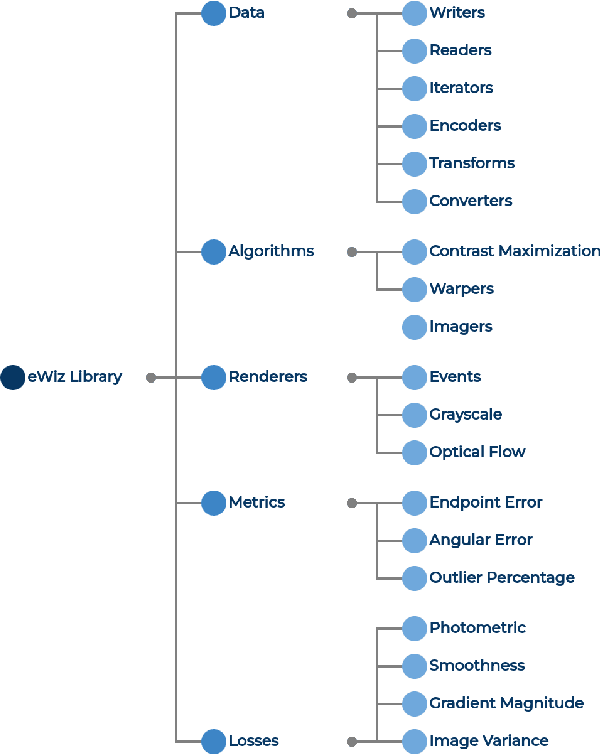
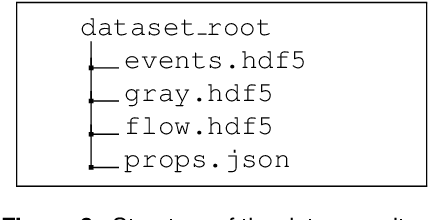
The joint use of event-based vision and Spiking Neural Networks (SNNs) is expected to have a large impact in robotics in the near future, in tasks such as, visual odometry and obstacle avoidance. While researchers have used real-world event datasets for optical flow prediction (mostly captured with Unmanned Aerial Vehicles (UAVs)), these datasets are limited in diversity, scalability, and are challenging to collect. Thus, synthetic datasets offer a scalable alternative by bridging the gap between reality and simulation. In this work, we address the lack of datasets by introducing eWiz, a comprehensive library for processing event-based data. It includes tools for data loading, augmentation, visualization, encoding, and generation of training data, along with loss functions and performance metrics. We further present a synthetic event-based datasets and data generation pipelines for optical flow prediction tasks. Built on top of eWiz, eCARLA-scenes makes use of the CARLA simulator to simulate self-driving car scenarios. The ultimate goal of this dataset is the depiction of diverse environments while laying a foundation for advancing event-based camera applications in autonomous field vehicle navigation, paving the way for using SNNs on neuromorphic hardware such as the Intel Loihi.