 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAchieving Meaningful Collaboration: Worker-centered Design of a Physical Human-Robot Collaborative Blending Task
Oct 14, 2025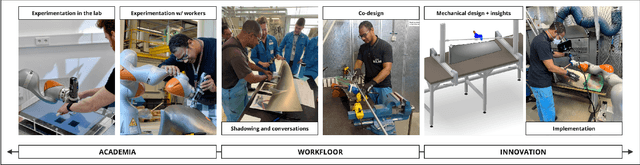
The use of robots in industrial settings continues to grow, driven by the need to address complex societal challenges such as labor shortages, aging populations, and ever-increasing production demands. In this abstract, we advocate for (and demonstrate) a transdisciplinary approach when considering robotics in the workplace. Transdisciplinarity emphasizes the integration of academic research with pragmatic expertise and embodied experiential knowledge, that prioritize values such as worker wellbeing and job attractiveness. In the following, we describe an ongoing multi-pronged effort to explore the potential of collaborative robots in the context of airplane engine repair and maintenance operations.
Fitts' List Revisited: An Empirical Study on Function Allocation in a Two-Agent Physical Human-Robot Collaborative Position/Force Task
May 07, 2025In this letter, we investigate whether the classical function allocation holds for physical Human-Robot Collaboration, which is important for providing insights for Industry 5.0 to guide how to best augment rather than replace workers. This study empirically tests the applicability of Fitts' List within physical Human-Robot Collaboration, by conducting a user study (N=26, within-subject design) to evaluate four distinct allocations of position/force control between human and robot in an abstract blending task. We hypothesize that the function in which humans control the position achieves better performance and receives higher user ratings. When allocating position control to the human and force control to the robot, compared to the opposite case, we observed a significant improvement in preventing overblending. This was also perceived better in terms of physical demand and overall system acceptance, while participants experienced greater autonomy, more engagement and less frustration. An interesting insight was that the supervisory role (when the robot controls both position and force control) was rated second best in terms of subjective acceptance. Another surprising insight was that if position control was delegated to the robot, the participants perceived much lower autonomy than when the force control was delegated to the robot. These findings empirically support applying Fitts' principles to static function allocation for physical collaboration, while also revealing important nuanced user experience trade-offs, particularly regarding perceived autonomy when delegating position control.
Biomechanics-Aware Trajectory Optimization for Navigation during Robotic Physiotherapy
Nov 06, 2024



Robotic devices hold promise for aiding patients in orthopedic rehabilitation. However, current robotic-assisted physiotherapy methods struggle including biomechanical metrics in their control algorithms, crucial for safe and effective therapy. This paper introduces BATON, a Biomechanics-Aware Trajectory Optimization approach to robotic Navigation of human musculoskeletal loads. The method integrates a high-fidelity musculoskeletal model of the human shoulder into real-time control of robot-patient interaction during rotator cuff tendon rehabilitation. We extract skeletal dynamics and tendon loading information from an OpenSim shoulder model to solve an optimal control problem, generating strain-minimizing trajectories. Trajectories were realized on a healthy subject by an impedance-controlled robot while estimating the state of the subject's shoulder. Target poses were prescribed to design personalized rehabilitation across a wide range of shoulder motion avoiding high-strain areas. BATON was designed with real-time capabilities, enabling continuous trajectory replanning to address unforeseen variations in tendon strain, such as those from changing muscle activation of the subject.