 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA General Lie-Group Framework for Continuum Soft Robot Modeling
Mar 09, 2026This paper introduces a general Lie group framework for modeling continuum soft robots, employing Cosserat rod theory combined with cumulative parameterization on the Lie group SE(3). This novel approach addresses limitations present in current strain-based and configuration-based methods by providing geometric local control and eliminating unit quaternion constraints. The paper derives unified analytical expressions for kinematics, statics, and dynamics, including recursive Jacobian computations and an energy-conserving integrator suitable for real-time simulation and control. Additionally, the framework is extended to handle complex robotic structures, including segmented, branched, nested, and rigid-soft composite configurations, facilitating a modular and unified modeling strategy. The effectiveness, generality, and computational efficiency of the proposed methodology are demonstrated through various scenarios, including large-deformation rods, concentric tube robots, parallel robots, cable-driven robots, and articulated fingers. This work enhances modeling flexibility and numerical performance, providing an improved toolset for designing, simulating, and controlling soft robotic systems.
Bile Duct Segmentation Methods Under 3D Slicer Applied to ERCP: Advantages and Disadvantages
Dec 06, 2023This article presents an evaluation of biliary tract segmentation methods used for 3D reconstruction, which may be very usefull in various critical interventions, such as endoscopic retrograde cholangiopancreatography (ERCP), using the 3D Slicer software. This article provides an assessment of biliary tract segmentation techniques employed for 3D reconstruction, which can prove highly valuable in diverse critical procedures like endoscopic retrograde cholangiopancreatography (ERCP) through the utilization of 3D Slicer software. Three different methods, namely thresholding, flood filling, and region growing, were assessed in terms of their advantages and disadvantages. The study involved 10 patient cases and employed quantitative indices and qualitative evaluation to assess the segmentations obtained by the different segmentation methods against ground truth. The results indicate that the thresholding method is almost manual and time-consuming, while the flood filling method is semi-automatic and also time-consuming. Although both methods improve segmentation quality, they are not reproducible. Therefore, an automatic method based on region growing was developed to reduce segmentation time, albeit at the expense of quality. These findings highlight the pros and cons of different conventional segmentation methods and underscore the need to explore alternative approaches, such as deep learning, to optimize biliary tract segmentation in the context of ERCP.
Automatic laser steering for middle ear surgery
Aug 18, 2022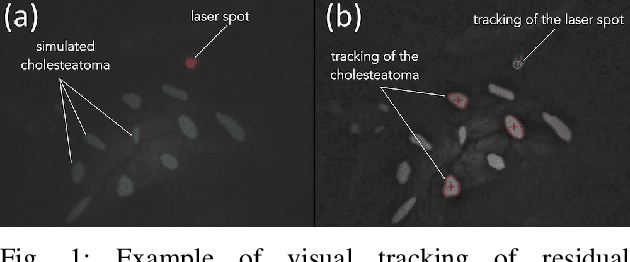
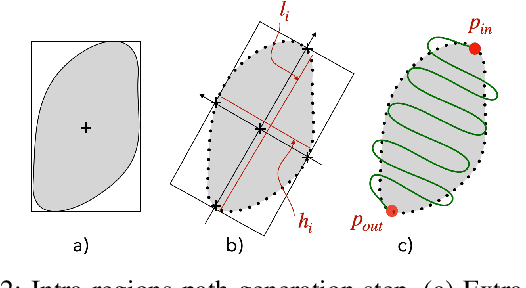
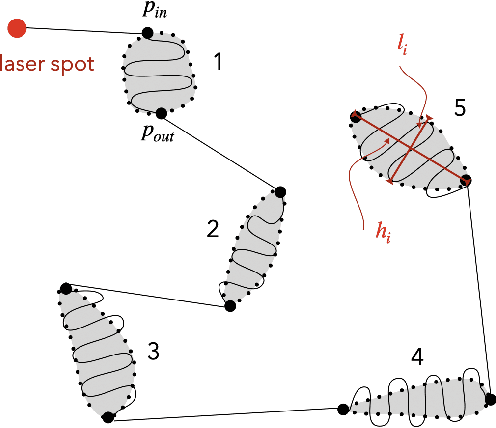
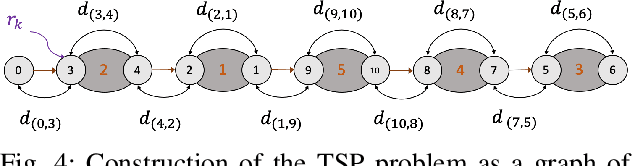
This paper deals with the control of laser spot in the context of minimally invasive surgery of the middle ear, e.g., cholesteatoma removal. More precisely, our work is concerned with the exhaustive burring of residual infected cells after primary mechanical resection of the pathological tissues since the latter cannot guarantee the treatment of all the infected tissues, the remaining infected cells cause regeneration of the diseases in 20%-25\-% of cases, which require a second surgery 12-18 months later. To tackle such a complex surgery, we have developed a robotic platform that consists of the combination of a macro-scale system (7 degrees of freedom (DoFs) robotic arm) and a micro-scale flexible system (2 DoFs) which operates inside the middle ear cavity. To be able to treat the residual cholesteatoma regions, we proposed a method to automatically generate optimal laser scanning trajectories inside the regions and between them. The trajectories are tacked using an image-based control scheme. The proposed method and materials were validated experimentally using the lab-made robotic platform. The obtained results in terms of accuracy and behaviour meet perfectly the laser surgery requirements.