 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic laser steering for middle ear surgery
Paper and Code
Aug 18, 2022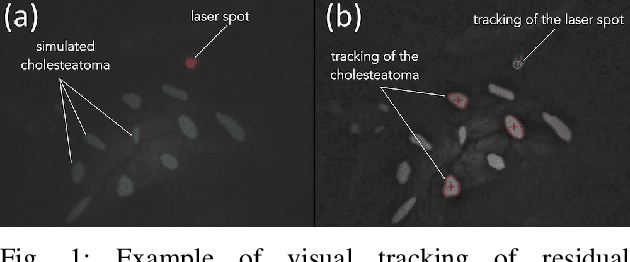
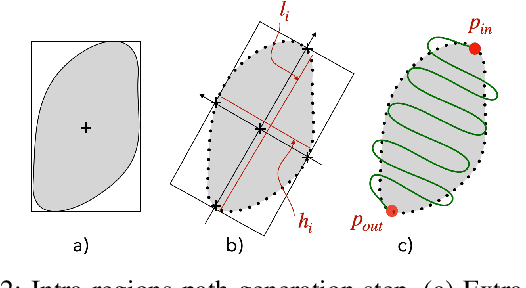
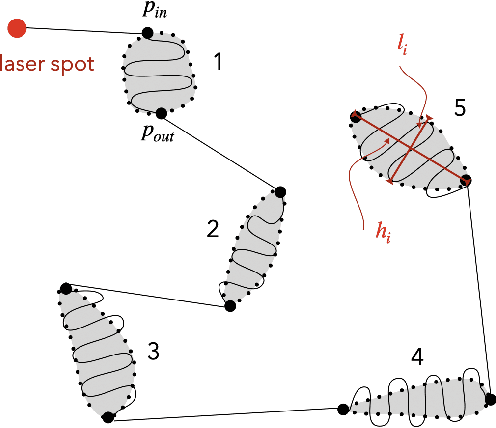
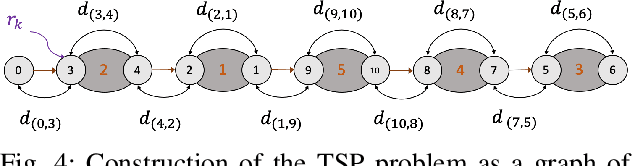
This paper deals with the control of laser spot in the context of minimally invasive surgery of the middle ear, e.g., cholesteatoma removal. More precisely, our work is concerned with the exhaustive burring of residual infected cells after primary mechanical resection of the pathological tissues since the latter cannot guarantee the treatment of all the infected tissues, the remaining infected cells cause regeneration of the diseases in 20%-25\-% of cases, which require a second surgery 12-18 months later. To tackle such a complex surgery, we have developed a robotic platform that consists of the combination of a macro-scale system (7 degrees of freedom (DoFs) robotic arm) and a micro-scale flexible system (2 DoFs) which operates inside the middle ear cavity. To be able to treat the residual cholesteatoma regions, we proposed a method to automatically generate optimal laser scanning trajectories inside the regions and between them. The trajectories are tacked using an image-based control scheme. The proposed method and materials were validated experimentally using the lab-made robotic platform. The obtained results in terms of accuracy and behaviour meet perfectly the laser surgery requirements.