 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThegra: Graph-based SLAM for Thermal Imagery
Feb 09, 2026Thermal imaging provides a practical sensing modality for visual SLAM in visually degraded environments such as low illumination, smoke, or adverse weather. However, thermal imagery often exhibits low texture, low contrast, and high noise, complicating feature-based SLAM. In this work, we propose a sparse monocular graph-based SLAM system for thermal imagery that leverages general-purpose learned features -- the SuperPoint detector and LightGlue matcher, trained on large-scale visible-spectrum data to improve cross-domain generalization. To adapt these components to thermal data, we introduce a preprocessing pipeline to enhance input suitability and modify core SLAM modules to handle sparse and outlier-prone feature matches. We further incorporate keypoint confidence scores from SuperPoint into a confidence-weighted factor graph to improve estimation robustness. Evaluations on public thermal datasets demonstrate that the proposed system achieves reliable performance without requiring dataset-specific training or fine-tuning a desired feature detector, given the scarcity of quality thermal data. Code will be made available upon publication.
Visual place recognition for aerial imagery: A survey
Jun 02, 2024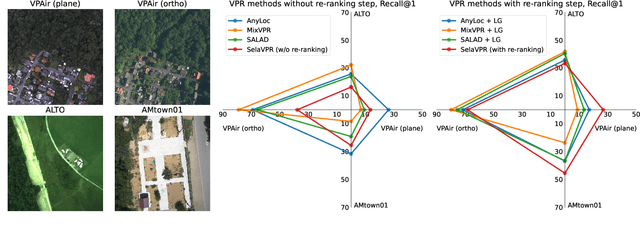
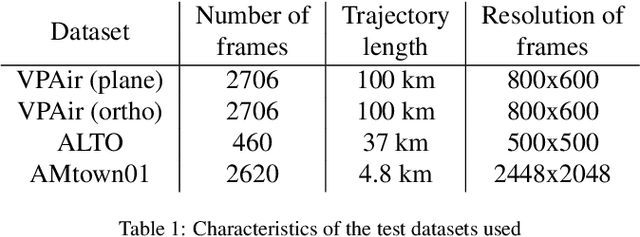
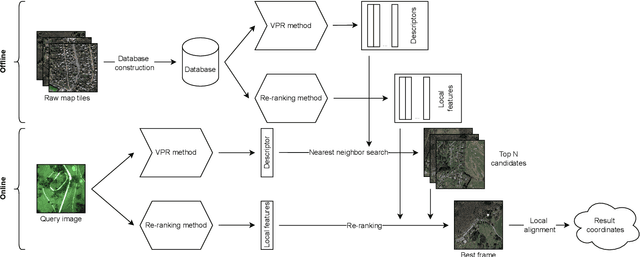
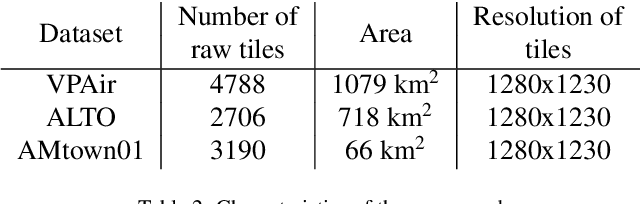
Aerial imagery and its direct application to visual localization is an essential problem for many Robotics and Computer Vision tasks. While Global Navigation Satellite Systems (GNSS) are the standard default solution for solving the aerial localization problem, it is subject to a number of limitations, such as, signal instability or solution unreliability that make this option not so desirable. Consequently, visual geolocalization is emerging as a viable alternative. However, adapting Visual Place Recognition (VPR) task to aerial imagery presents significant challenges, including weather variations and repetitive patterns. Current VPR reviews largely neglect the specific context of aerial data. This paper introduces a methodology tailored for evaluating VPR techniques specifically in the domain of aerial imagery, providing a comprehensive assessment of various methods and their performance. However, we not only compare various VPR methods, but also demonstrate the importance of selecting appropriate zoom and overlap levels when constructing map tiles to achieve maximum efficiency of VPR algorithms in the case of aerial imagery. The code is available on our GitHub repository -- https://github.com/prime-slam/aero-vloc.
Dominating Set Database Selection for Visual Place Recognition
Mar 09, 2023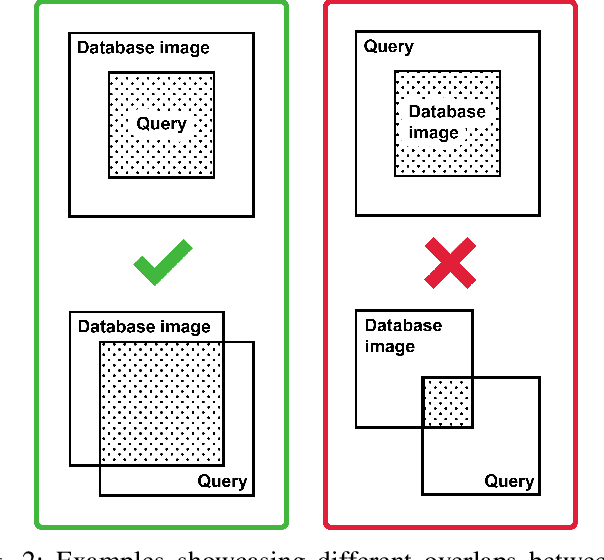

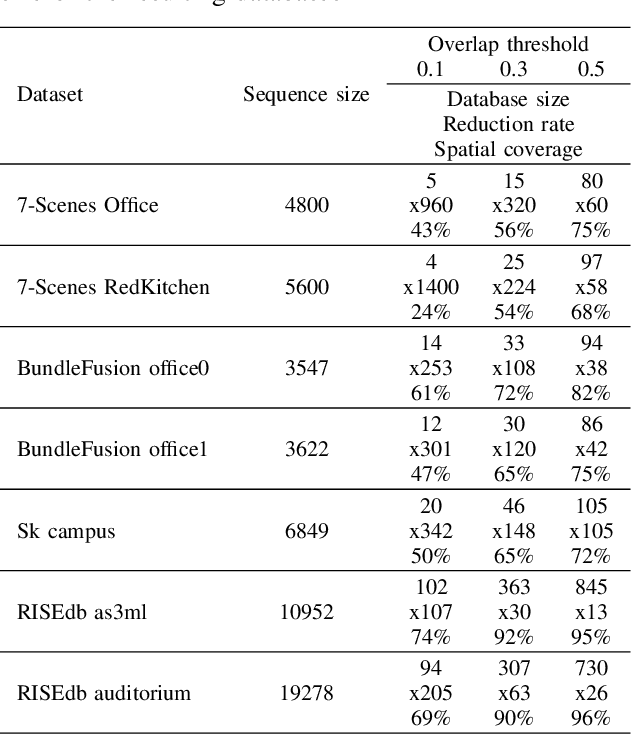

This paper presents an approach for creating a visual place recognition (VPR) database for localization in indoor environments from RGBD scanning sequences. The proposed approach is formulated as a minimization problem in terms of dominating set algorithm for graph, constructed from spatial information, and referred as DominatingSet. Our algorithm shows better scene coverage in comparison to other methodologies that are used for database creation. Also, we demonstrate that using DominatingSet, a database size could be up to 250-1400 times smaller than the original scanning sequence while maintaining a recall rate of more than 80% on testing sequences. We evaluated our algorithm on 7-scenes and BundleFusion datasets and an additionally recorded sequence in a highly repetitive office setting. In addition, the database selection can produce weakly-supervised labels for fine-tuning neural place recognition algorithms to particular settings, improving even more their accuracy. The paper also presents a fully automated pipeline for VPR database creation from RGBD scanning sequences, as well as a set of metrics for VPR database evaluation. The code and released data are available on our web-page~ -- https://prime-slam.github.io/place-recognition-db/