 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDC3DCD: unsupervised learning for multiclass 3D point cloud change detection
May 09, 2023
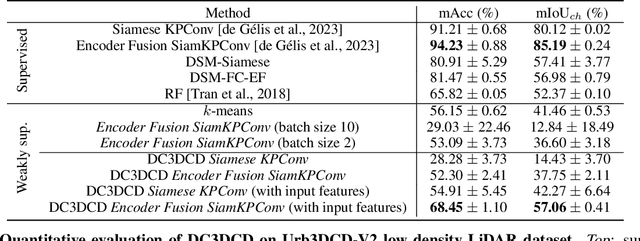
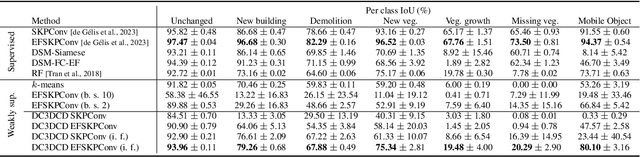
In a constant evolving world, change detection is of prime importance to keep updated maps. To better sense areas with complex geometry (urban areas in particular), considering 3D data appears to be an interesting alternative to classical 2D images. In this context, 3D point clouds (PCs) obtained by LiDAR or photogrammetry are very interesting. While recent studies showed the considerable benefit of using deep learning-based methods to detect and characterize changes into raw 3D PCs, these studies rely on large annotated training data to obtain accurate results. The collection of these annotations are tricky and time-consuming. The availability of unsupervised or weakly supervised approaches is then of prime interest. In this paper, we propose an unsupervised method, called DeepCluster 3D Change Detection (DC3DCD), to detect and categorize multiclass changes at point level. We classify our approach in the unsupervised family given the fact that we extract in a completely unsupervised way a number of clusters associated with potential changes. Let us precise that in the end of the process, the user has only to assign a label to each of these clusters to derive the final change map. Our method builds upon the DeepCluster approach, originally designed for image classification, to handle complex raw 3D PCs and perform change segmentation task. An assessment of the method on both simulated and real public dataset is provided. The proposed method allows to outperform fully-supervised traditional machine learning algorithm and to be competitive with fully-supervised deep learning networks applied on rasterization of 3D PCs with a mean of IoU over classes of change of 57.06% and 66.69% for the simulated and the real datasets, respectively.
Deep Unsupervised Learning for 3D ALS Point Clouds Change Detection
May 05, 2023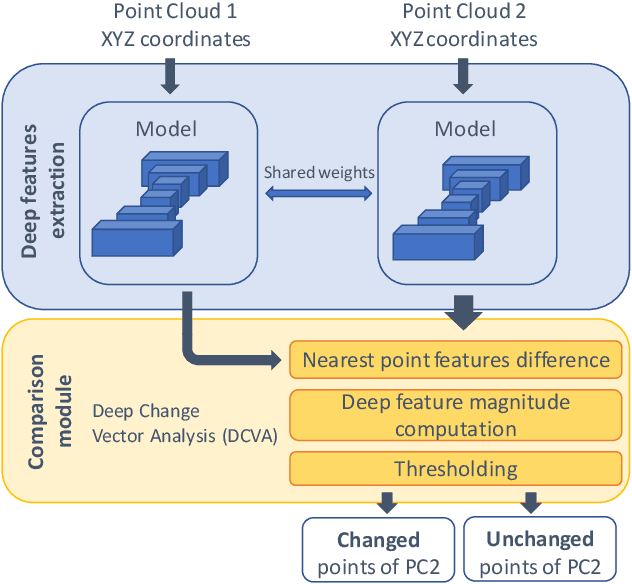


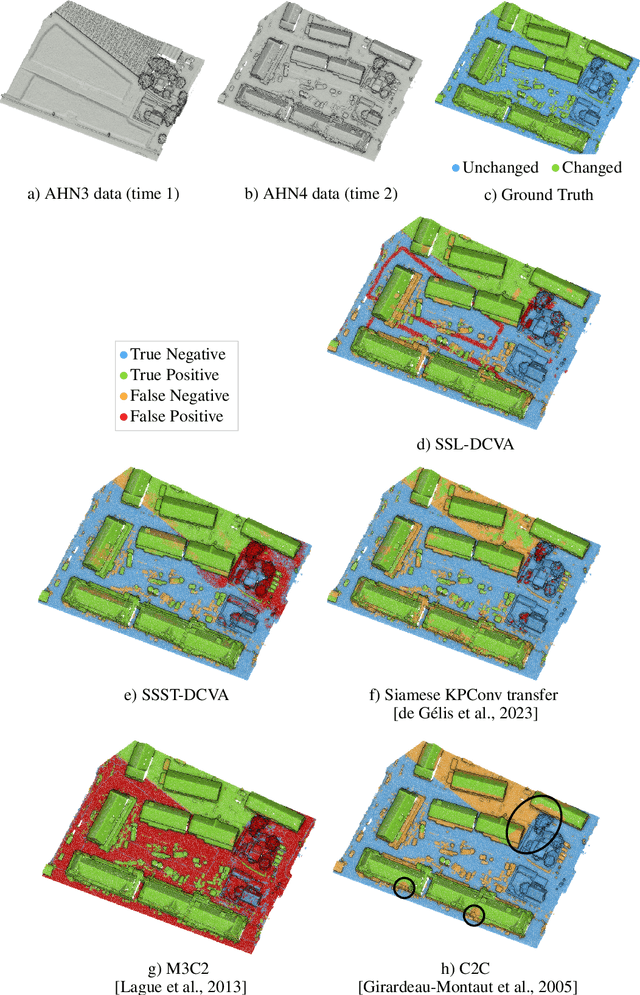
Change detection from traditional optical images has limited capability to model the changes in the height or shape of objects. Change detection using 3D point cloud aerial LiDAR survey data can fill this gap by providing critical depth information. While most existing machine learning based 3D point cloud change detection methods are supervised, they severely depend on the availability of annotated training data, which is in practice a critical point. To circumnavigate this dependence, we propose an unsupervised 3D point cloud change detection method mainly based on self-supervised learning using deep clustering and contrastive learning. The proposed method also relies on an adaptation of deep change vector analysis to 3D point cloud via nearest point comparison. Experiments conducted on a publicly available real dataset show that the proposed method obtains higher performance in comparison to the traditional unsupervised methods, with a gain of about 9% in mean accuracy (to reach more than 85%). Thus, it appears to be a relevant choice in scenario where prior knowledge (labels) is not ensured.
Change detection needs change information: improving deep 3D point cloud change detection
Apr 25, 2023



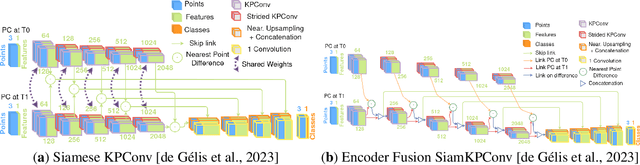
Change detection is an important task to rapidly identify modified areas, in particular when multi-temporal data are concerned. In landscapes with complex geometry such as urban environment, vertical information turn out to be a very useful knowledge not only to highlight changes but also to classify them into different categories. In this paper, we focus on change segmentation directly using raw 3D point clouds (PCs), to avoid any loss of information due to rasterization processes. While deep learning has recently proved its effectiveness for this particular task by encoding the information through Siamese networks, we investigate here the idea of also using change information in early steps of deep networks. To do this, we first propose to provide the Siamese KPConv State-of-The-Art (SoTA) network with hand-crafted features and especially a change-related one. This improves the mean of Intersection over Union (IoU) over classes of change by 4.70\%. Considering that the major improvement was obtained thanks to the change-related feature, we propose three new architectures to address 3D PCs change segmentation: OneConvFusion, Triplet KPConv, and Encoder Fusion SiamKPConv. All the three networks take into account change information in early steps and outperform SoTA methods. In particular, the last network, entitled Encoder Fusion SiamKPConv, overtakes SoTA with more than 5% of mean of IoU over classes of change emphasizing the value of having the network focus on change information for change detection task.