 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning Based Dynamic Selection of Auxiliary Objectives with Preserving of the Best Found Solution
Apr 24, 2017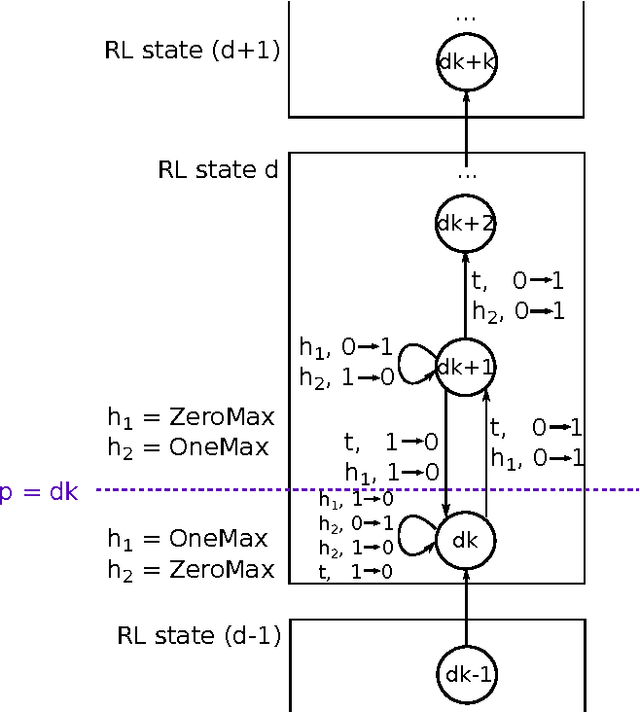
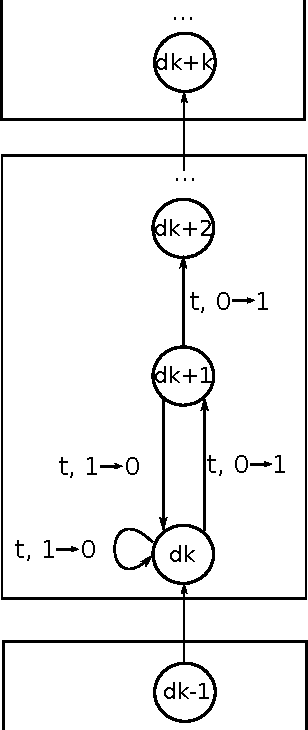
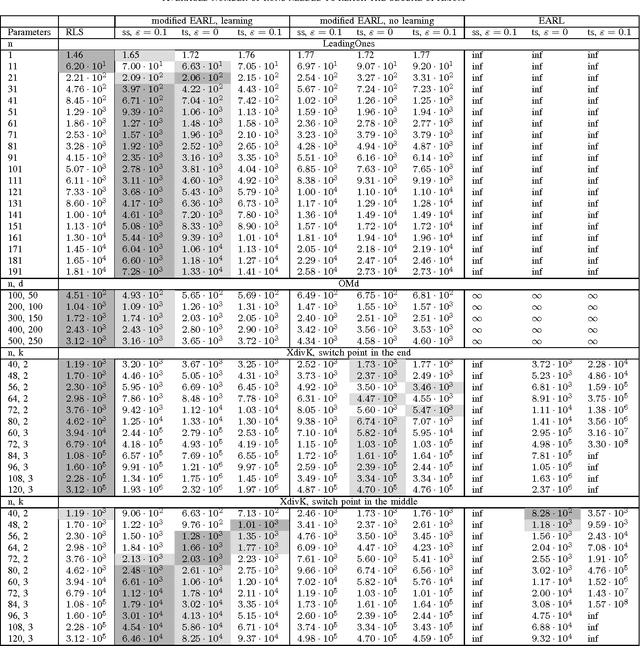
Efficiency of single-objective optimization can be improved by introducing some auxiliary objectives. Ideally, auxiliary objectives should be helpful. However, in practice, objectives may be efficient on some optimization stages but obstructive on others. In this paper we propose a modification of the EA+RL method which dynamically selects optimized objectives using reinforcement learning. The proposed modification prevents from losing the best found solution. We analysed the proposed modification and compared it with the EA+RL method and Random Local Search on XdivK, Generalized OneMax and LeadingOnes problems. The proposed modification outperforms the EA+RL method on all problem instances. It also outperforms the single objective approach on the most problem instances. We also provide detailed analysis of how different components of the considered algorithms influence efficiency of optimization. In addition, we present theoretical analysis of the proposed modification on the XdivK problem.
Adaptive Parameter Selection in Evolutionary Algorithms by Reinforcement Learning with Dynamic Discretization of Parameter Range
Mar 22, 2016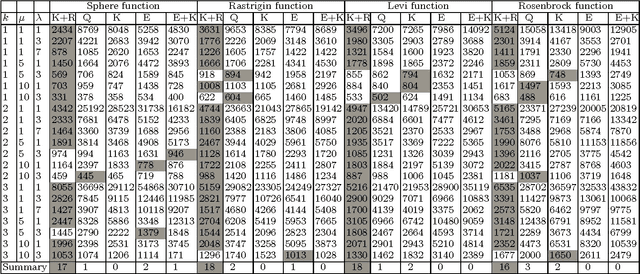

Online parameter controllers for evolutionary algorithms adjust values of parameters during the run of an evolutionary algorithm. Recently a new efficient parameter controller based on reinforcement learning was proposed by Karafotias et al. In this method ranges of parameters are discretized into several intervals before the run. However, performing adaptive discretization during the run may increase efficiency of an evolutionary algorithm. Aleti et al. proposed another efficient controller with adaptive discretization. In the present paper we propose a parameter controller based on reinforcement learning with adaptive discretization. The proposed controller is compared with the existing parameter adjusting methods on several test problems using different configurations of an evolutionary algorithm. For the test problems, we consider four continuous functions, namely the sphere function, the Rosenbrock function, the Levi function and the Rastrigin function. Results show that the new controller outperforms the other controllers on most of the considered test problems.