 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Parameter Selection in Evolutionary Algorithms by Reinforcement Learning with Dynamic Discretization of Parameter Range
Mar 22, 2016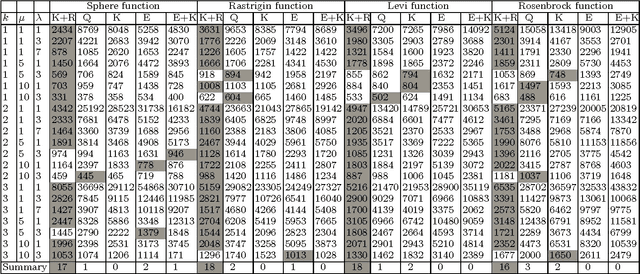

Online parameter controllers for evolutionary algorithms adjust values of parameters during the run of an evolutionary algorithm. Recently a new efficient parameter controller based on reinforcement learning was proposed by Karafotias et al. In this method ranges of parameters are discretized into several intervals before the run. However, performing adaptive discretization during the run may increase efficiency of an evolutionary algorithm. Aleti et al. proposed another efficient controller with adaptive discretization. In the present paper we propose a parameter controller based on reinforcement learning with adaptive discretization. The proposed controller is compared with the existing parameter adjusting methods on several test problems using different configurations of an evolutionary algorithm. For the test problems, we consider four continuous functions, namely the sphere function, the Rosenbrock function, the Levi function and the Rastrigin function. Results show that the new controller outperforms the other controllers on most of the considered test problems.