 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGCNNMatch: Graph Convolutional Neural Networks for Multi-Object Tracking via Sinkhorn Normalization
Oct 07, 2020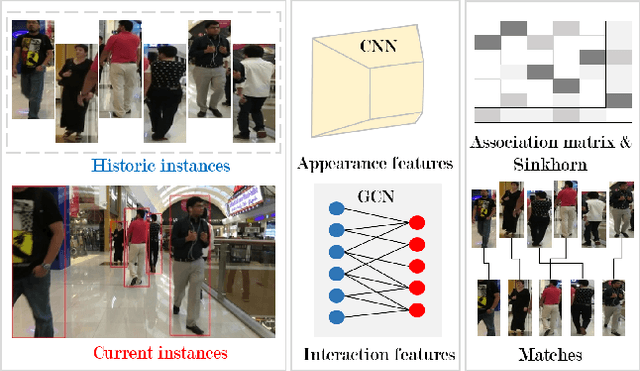

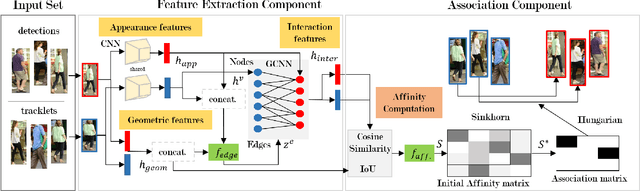
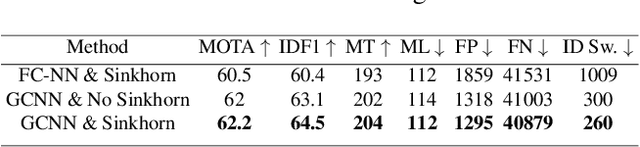
This paper proposes a novel method for online Multi-Object Tracking (MOT) using Graph Convolutional Neural Network (GCNN) based feature extraction and end-to-end feature matching for object association. The Graph based approach incorporates both appearance and geometry of objects at past frames as well as the current frame into the task of feature learning. This new paradigm enables the network to leverage the "context" information of the geometry of objects and allows us to model the interactions among the features of multiple objects. Another central innovation of our proposed framework is the use of the Sinkhorn algorithm for end-to-end learning of the associations among objects during model training. The network is trained to predict object associations by taking into account constraints specific to the MOT task. Experimental results demonstrate the efficacy of the proposed approach in achieving top performance on the MOT16 & 17 Challenge problems among state-of-the-art online and supervised approaches. The code is available at https://github.com/IPapakis/GCNNMatch.