 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-scale and Multi-path Cascaded Convolutional Network for Semantic Segmentation of Colorectal Polyps
Dec 03, 2024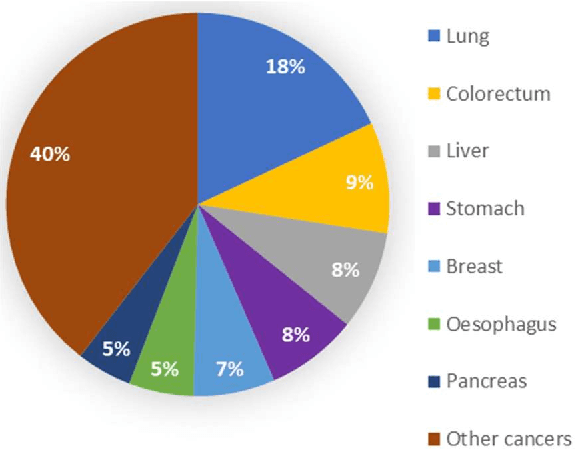

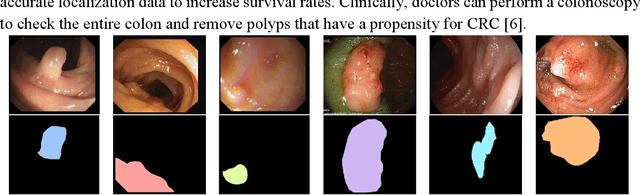
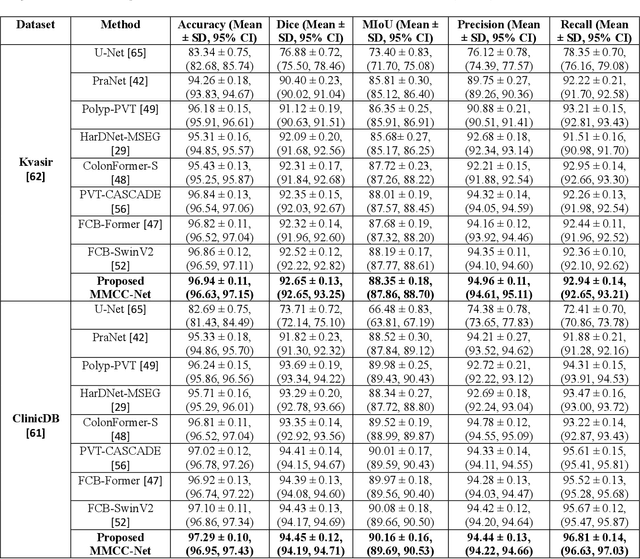
Colorectal polyps are structural abnormalities of the gastrointestinal tract that can potentially become cancerous in some cases. The study introduces a novel framework for colorectal polyp segmentation named the Multi-Scale and Multi-Path Cascaded Convolution Network (MMCC-Net), aimed at addressing the limitations of existing models, such as inadequate spatial dependence representation and the absence of multi-level feature integration during the decoding stage by integrating multi-scale and multi-path cascaded convolutional techniques and enhances feature aggregation through dual attention modules, skip connections, and a feature enhancer. MMCC-Net achieves superior performance in identifying polyp areas at the pixel level. The Proposed MMCC-Net was tested across six public datasets and compared against eight SOTA models to demonstrate its efficiency in polyp segmentation. The MMCC-Net's performance shows Dice scores with confidence intervals ranging between (77.08, 77.56) and (94.19, 94.71) and Mean Intersection over Union (MIoU) scores with confidence intervals ranging from (72.20, 73.00) to (89.69, 90.53) on the six databases. These results highlight the model's potential as a powerful tool for accurate and efficient polyp segmentation, contributing to early detection and prevention strategies in colorectal cancer.
Predicting Traffic Flow with Federated Learning and Graph Neural with Asynchronous Computations Network
Jan 05, 2024
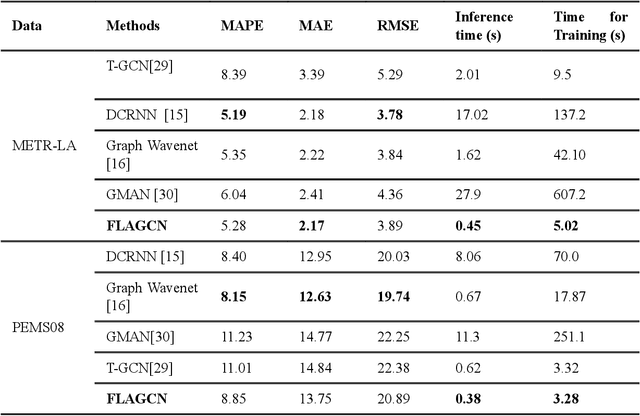
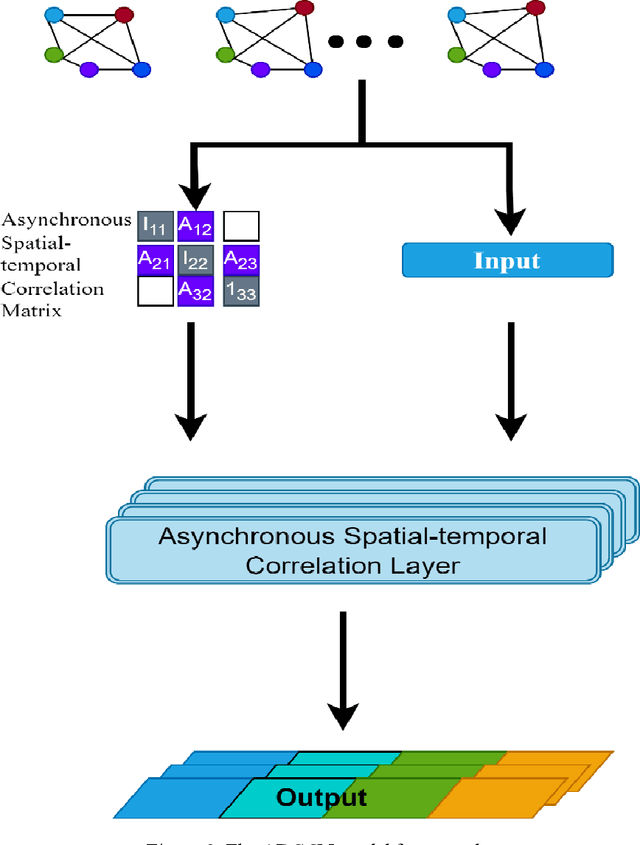

Real-time traffic flow prediction holds significant importance within the domain of Intelligent Transportation Systems (ITS). The task of achieving a balance between prediction precision and computational efficiency presents a significant challenge. In this article, we present a novel deep-learning method called Federated Learning and Asynchronous Graph Convolutional Network (FLAGCN). Our framework incorporates the principles of asynchronous graph convolutional networks with federated learning to enhance the accuracy and efficiency of real-time traffic flow prediction. The FLAGCN model employs a spatial-temporal graph convolution technique to asynchronously address spatio-temporal dependencies within traffic data effectively. To efficiently handle the computational requirements associated with this deep learning model, this study used a graph federated learning technique known as GraphFL. This approach is designed to facilitate the training process. The experimental results obtained from conducting tests on two distinct traffic datasets demonstrate that the utilization of FLAGCN leads to the optimization of both training and inference durations while maintaining a high level of prediction accuracy. FLAGCN outperforms existing models with significant improvements by achieving up to approximately 6.85% reduction in RMSE, 20.45% reduction in MAPE, compared to the best-performing existing models.