 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA unified strategy for implementing curiosity and empowerment driven reinforcement learning
Jun 18, 2018
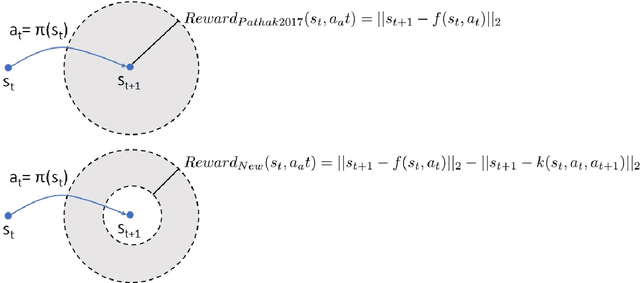
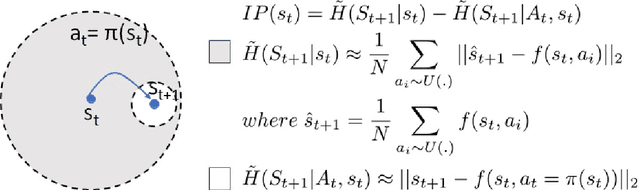

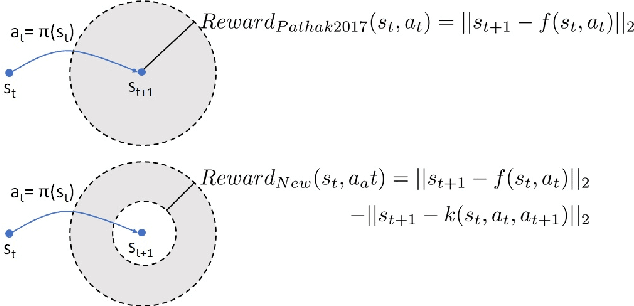
Although there are many approaches to implement intrinsically motivated artificial agents, the combined usage of multiple intrinsic drives remains still a relatively unexplored research area. Specifically, we hypothesize that a mechanism capable of quantifying and controlling the evolution of the information flow between the agent and the environment could be the fundamental component for implementing a higher degree of autonomy into artificial intelligent agents. This paper propose a unified strategy for implementing two semantically orthogonal intrinsic motivations: curiosity and empowerment. Curiosity reward informs the agent about the relevance of a recent agent action, whereas empowerment is implemented as the opposite information flow from the agent to the environment that quantifies the agent's potential of controlling its own future. We show that an additional homeostatic drive is derived from the curiosity reward, which generalizes and enhances the information gain of a classical curious/heterostatic reinforcement learning agent. We show how a shared internal model by curiosity and empowerment facilitates a more efficient training of the empowerment function. Finally, we discuss future directions for further leveraging the interplay between these two intrinsic rewards.
Curiosity-driven reinforcement learning with homeostatic regulation
Feb 07, 2018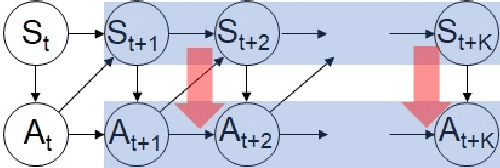

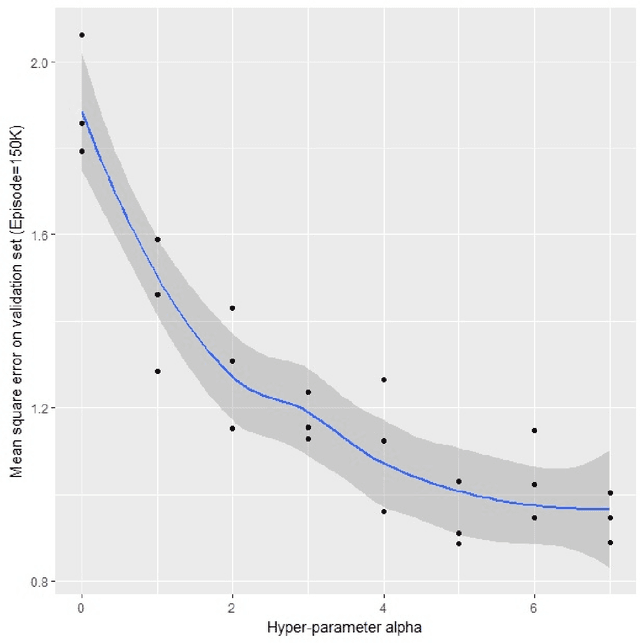
We propose a curiosity reward based on information theory principles and consistent with the animal instinct to maintain certain critical parameters within a bounded range. Our experimental validation shows the added value of the additional homeostatic drive to enhance the overall information gain of a reinforcement learning agent interacting with a complex environment using continuous actions. Our method builds upon two ideas: i) To take advantage of a new Bellman-like equation of information gain and ii) to simplify the computation of the local rewards by avoiding the approximation of complex distributions over continuous states and actions.