 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputer Vision based Animal Collision Avoidance Framework for Autonomous Vehicles
Dec 20, 2020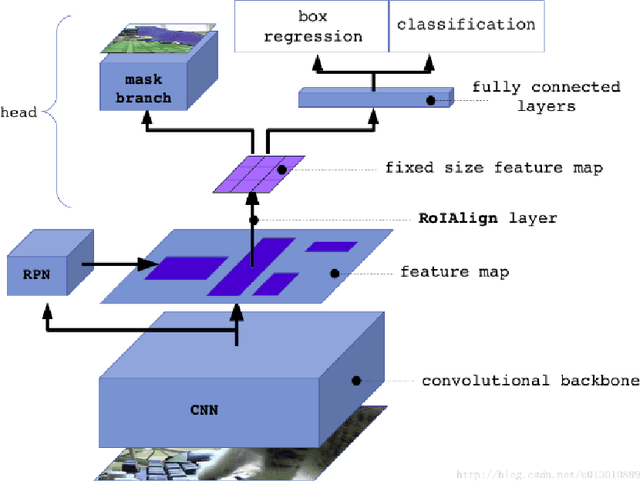
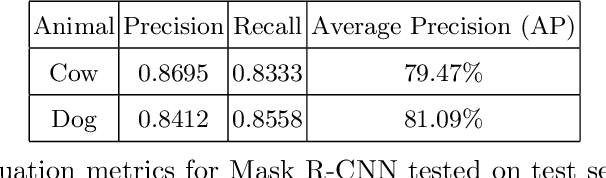
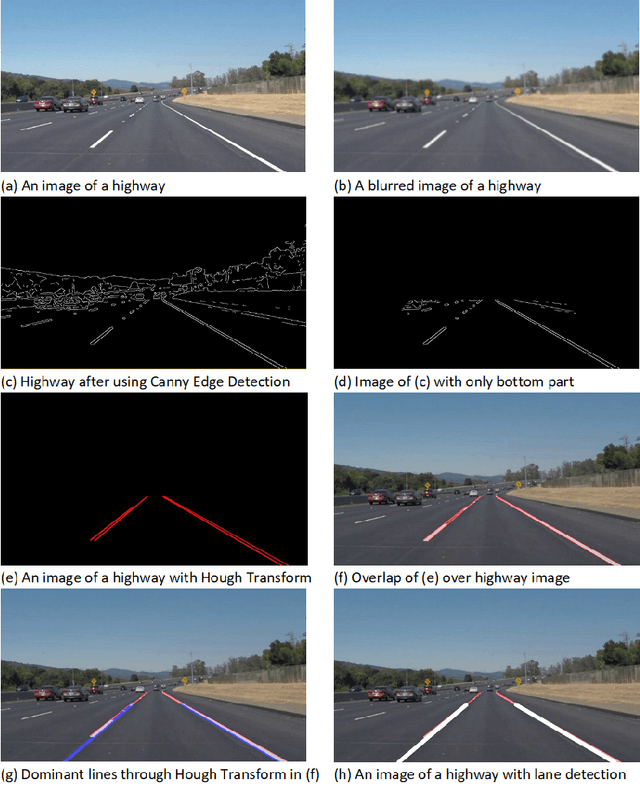
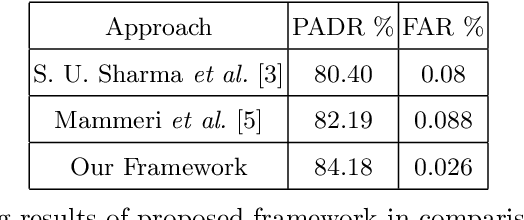
Animals have been a common sighting on roads in India which leads to several accidents between them and vehicles every year. This makes it vital to develop a support system for driverless vehicles that assists in preventing these forms of accidents. In this paper, we propose a neoteric framework for avoiding vehicle-to-animal collisions by developing an efficient approach for the detection of animals on highways using deep learning and computer vision techniques on dashcam video. Our approach leverages the Mask R-CNN model for detecting and identifying various commonly found animals. Then, we perform lane detection to deduce whether a detected animal is on the vehicle's lane or not and track its location and direction of movement using a centroid based object tracking algorithm. This approach ensures that the framework is effective at determining whether an animal is obstructing the path or not of an autonomous vehicle in addition to predicting its movement and giving feedback accordingly. This system was tested under various lighting and weather conditions and was observed to perform relatively well, which leads the way for prominent driverless vehicle's support systems for avoiding vehicular collisions with animals on Indian roads in real-time.
Computer Vision based Accident Detection for Autonomous Vehicles
Dec 20, 2020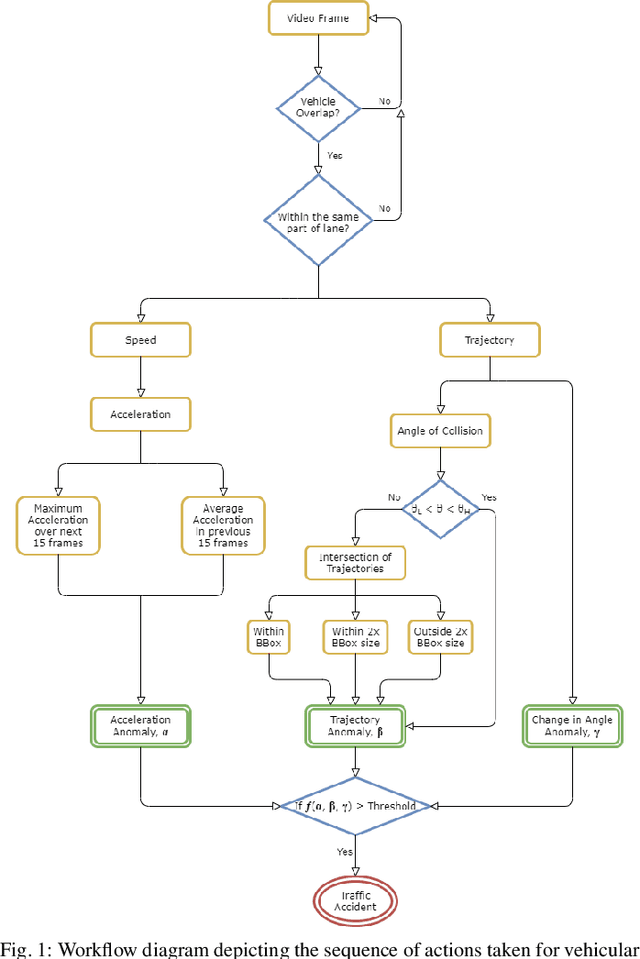
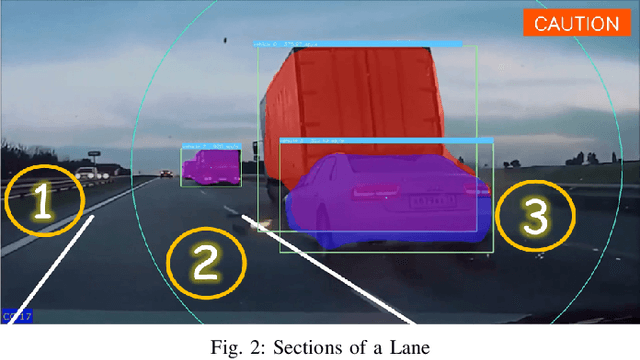

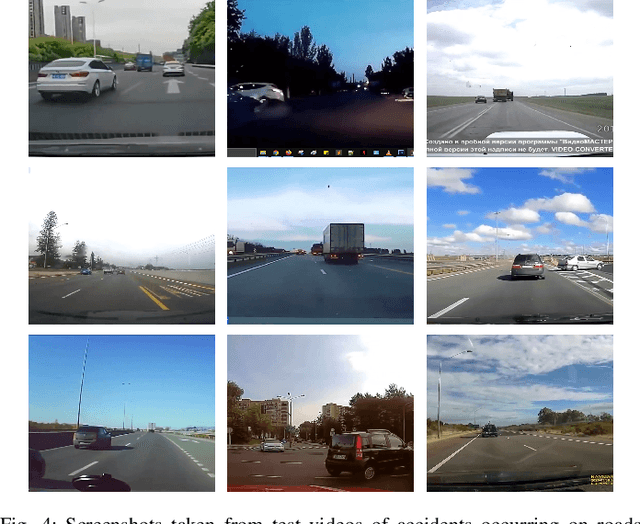
Numerous Deep Learning and sensor-based models have been developed to detect potential accidents with an autonomous vehicle. However, a self-driving car needs to be able to detect accidents between other vehicles in its path and take appropriate actions such as to slow down or stop and inform the concerned authorities. In this paper, we propose a novel support system for self-driving cars that detects vehicular accidents through a dashboard camera. The system leverages the Mask R-CNN framework for vehicle detection and a centroid tracking algorithm to track the detected vehicle. Additionally, the framework calculates various parameters such as speed, acceleration, and trajectory to determine whether an accident has occurred between any of the tracked vehicles. The framework has been tested on a custom dataset of dashcam footage and achieves a high accident detection rate while maintaining a low false alarm rate.