 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStatistically Assuring Safety of Control Systems using Ensembles of Safety Filters and Conformal Prediction
Nov 11, 2025Safety assurance is a fundamental requirement for deploying learning-enabled autonomous systems. Hamilton-Jacobi (HJ) reachability analysis is a fundamental method for formally verifying safety and generating safe controllers. However, computing the HJ value function that characterizes the backward reachable set (BRS) of a set of user-defined failure states is computationally expensive, especially for high-dimensional systems, motivating the use of reinforcement learning approaches to approximate the value function. Unfortunately, a learned value function and its corresponding safe policy are not guaranteed to be correct. The learned value function evaluated at a given state may not be equal to the actual safety return achieved by following the learned safe policy. To address this challenge, we introduce a conformal prediction-based (CP) framework that bounds such uncertainty. We leverage CP to provide probabilistic safety guarantees when using learned HJ value functions and policies to prevent control systems from reaching failure states. Specifically, we use CP to calibrate the switching between the unsafe nominal controller and the learned HJ-based safe policy and to derive safety guarantees under this switched policy. We also investigate using an ensemble of independently trained HJ value functions as a safety filter and compare this ensemble approach to using individual value functions alone.
Designing Latent Safety Filters using Pre-Trained Vision Models
Sep 18, 2025Ensuring safety of vision-based control systems remains a major challenge hindering their deployment in critical settings. Safety filters have gained increased interest as effective tools for ensuring the safety of classical control systems, but their applications in vision-based control settings have so far been limited. Pre-trained vision models (PVRs) have been shown to be effective perception backbones for control in various robotics domains. In this paper, we are interested in examining their effectiveness when used for designing vision-based safety filters. We use them as backbones for classifiers defining failure sets, for Hamilton-Jacobi (HJ) reachability-based safety filters, and for latent world models. We discuss the trade-offs between training from scratch, fine-tuning, and freezing the PVRs when training the models they are backbones for. We also evaluate whether one of the PVRs is superior across all tasks, evaluate whether learned world models or Q-functions are better for switching decisions to safe policies, and discuss practical considerations for deploying these PVRs on resource-constrained devices.
Learning Neural Control Barrier Functions from Offline Data with Conservatism
May 01, 2025



Safety filters, particularly those based on control barrier functions, have gained increased interest as effective tools for safe control of dynamical systems. Existing correct-by-construction synthesis algorithms, however, suffer from the curse of dimensionality. Deep learning approaches have been proposed in recent years to address this challenge. In this paper, we contribute to this line of work by proposing an algorithm for training control barrier functions from offline datasets. Our algorithm trains the filter to not only prevent the system from reaching unsafe states but also out-of-distribution ones, at which the filter would be unreliable. It is inspired by Conservative Q-learning, an offline reinforcement learning algorithm. We call its outputs Conservative Control Barrier Functions (CCBFs). Our empirical results demonstrate that CCBFs outperform existing methods in maintaining safety and out-of-distribution avoidance while minimally affecting task performance.
Learning Ensembles of Vision-based Safety Control Filters
Dec 02, 2024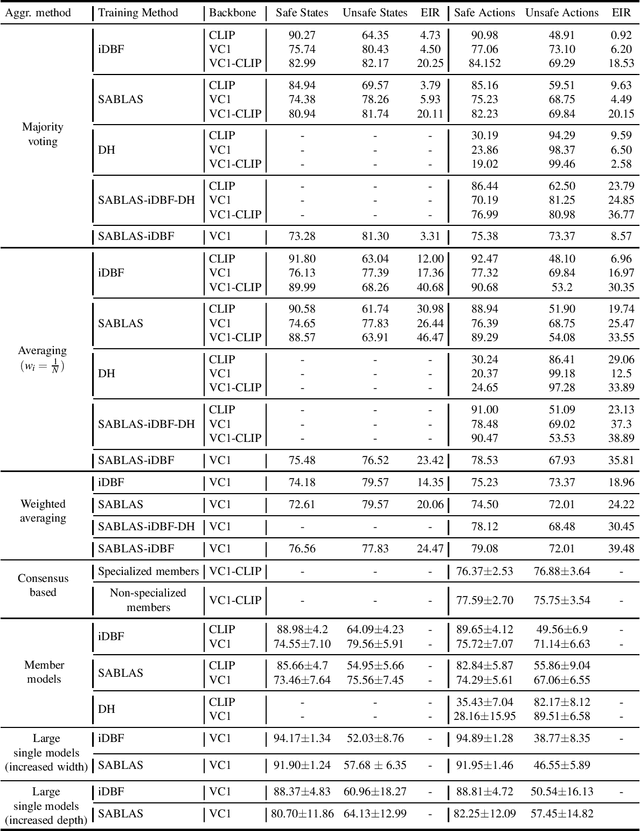

Safety filters in control systems correct nominal controls that violate safety constraints. Designing such filters as functions of visual observations in uncertain and complex environments is challenging. Several deep learning-based approaches to tackle this challenge have been proposed recently. However, formally verifying that the learned filters satisfy critical properties that enable them to guarantee the safety of the system is currently beyond reach. Instead, in this work, motivated by the success of ensemble methods in reinforcement learning, we empirically investigate the efficacy of ensembles in enhancing the accuracy and the out-of-distribution generalization of such filters, as a step towards more reliable ones. We experiment with diverse pre-trained vision representation models as filter backbones, training approaches, and output aggregation techniques. We compare the performance of ensembles with different configurations against each other, their individual member models, and large single-model baselines in distinguishing between safe and unsafe states and controls in the DeepAccident dataset. Our results show that diverse ensembles have better state and control classification accuracies compared to individual models.