 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Ensembles of Vision-based Safety Control Filters
Paper and Code
Dec 02, 2024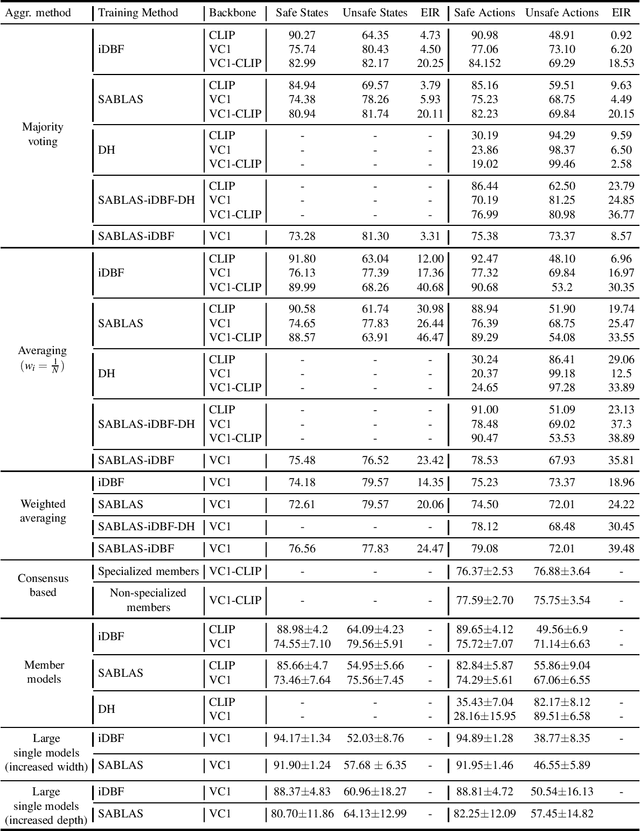

Safety filters in control systems correct nominal controls that violate safety constraints. Designing such filters as functions of visual observations in uncertain and complex environments is challenging. Several deep learning-based approaches to tackle this challenge have been proposed recently. However, formally verifying that the learned filters satisfy critical properties that enable them to guarantee the safety of the system is currently beyond reach. Instead, in this work, motivated by the success of ensemble methods in reinforcement learning, we empirically investigate the efficacy of ensembles in enhancing the accuracy and the out-of-distribution generalization of such filters, as a step towards more reliable ones. We experiment with diverse pre-trained vision representation models as filter backbones, training approaches, and output aggregation techniques. We compare the performance of ensembles with different configurations against each other, their individual member models, and large single-model baselines in distinguishing between safe and unsafe states and controls in the DeepAccident dataset. Our results show that diverse ensembles have better state and control classification accuracies compared to individual models.