 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparative Study of Vision Transformers and CNNs for Few-Shot Rigid Transformation and Fundamental Matrix Estimation
Oct 06, 2025Vision-transformers (ViTs) and large-scale convolution-neural-networks (CNNs) have reshaped computer vision through pretrained feature representations that enable strong transfer learning for diverse tasks. However, their efficiency as backbone architectures for geometric estimation tasks involving image deformations in low-data regimes remains an open question. This work considers two such tasks: 1) estimating 2D rigid transformations between pairs of images and 2) predicting the fundamental matrix for stereo image pairs, an important problem in various applications, such as autonomous mobility, robotics, and 3D scene reconstruction. Addressing this intriguing question, this work systematically compares large-scale CNNs (ResNet, EfficientNet, CLIP-ResNet) with ViT-based foundation models (CLIP-ViT variants and DINO) in various data size settings, including few-shot scenarios. These pretrained models are optimized for classification or contrastive learning, encouraging them to focus mostly on high-level semantics. The considered tasks require balancing local and global features differently, challenging the straightforward adoption of these models as the backbone. Empirical comparative analysis shows that, similar to training from scratch, ViTs outperform CNNs during refinement in large downstream-data scenarios. However, in small data scenarios, the inductive bias and smaller capacity of CNNs improve their performance, allowing them to match that of a ViT. Moreover, ViTs exhibit stronger generalization in cross-domain evaluation where the data distribution changes. These results emphasize the importance of carefully selecting model architectures for refinement, motivating future research towards hybrid architectures that balance local and global representations.
Tangential Velocity Estimation Using Near-Field Automotive Radar Model
Sep 04, 2025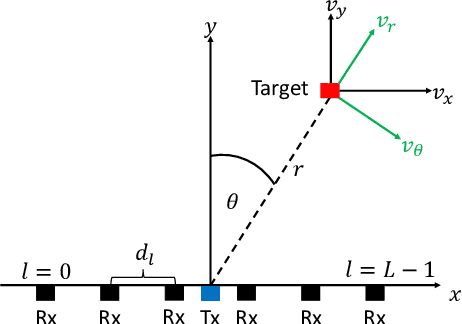
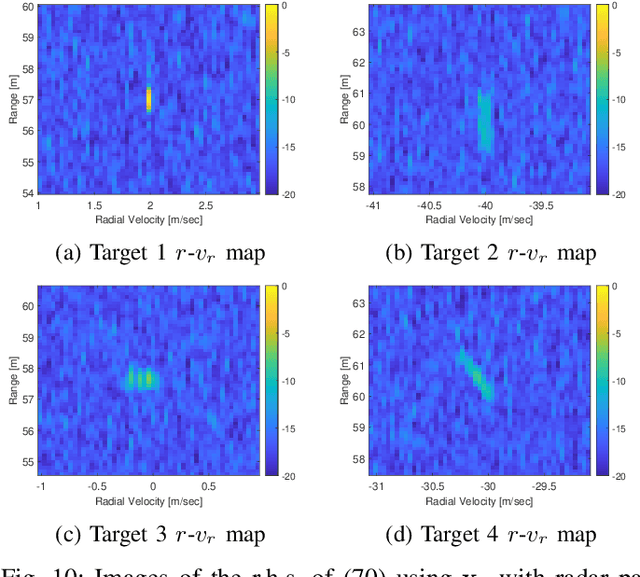
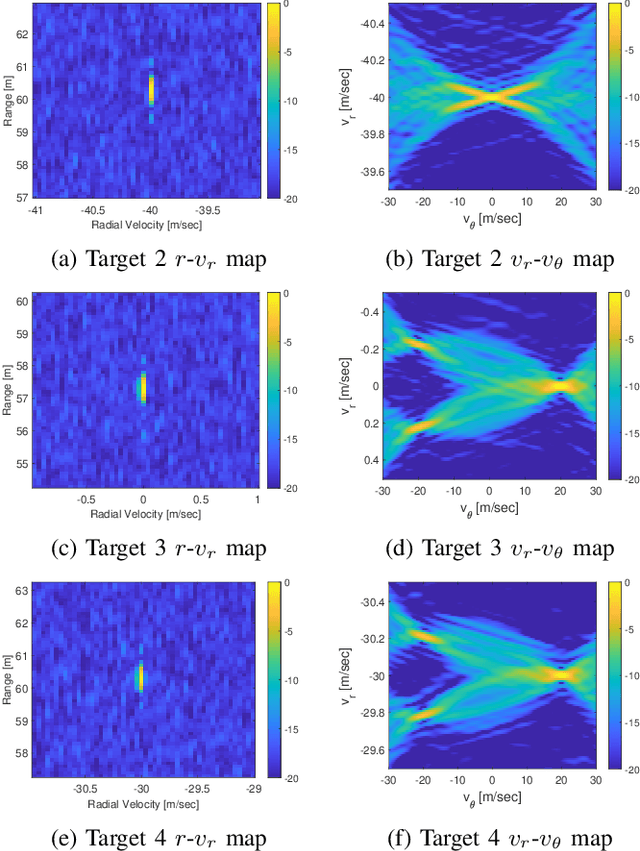
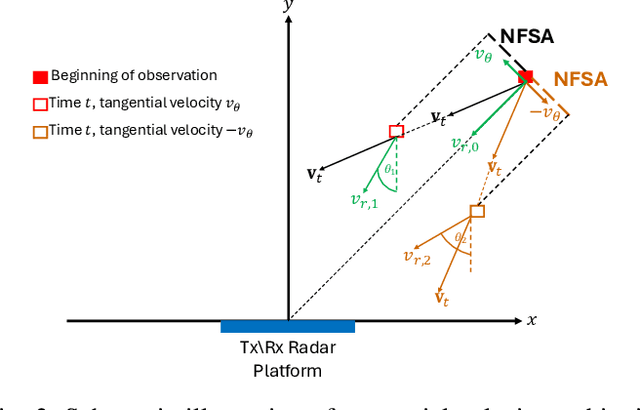
This work investigates the problem of tangential velocity estimation in automotive radar systems, addressing the limitations of conventionally considered models. Conventional automotive radars are usually based on far-field models and estimate the target's range, radial velocity, and direction-of-arrival (DOA) but are not able to estimate the tangential component of the target 2-D velocity, which is a critical parameter for reliable perception of dynamic environments. To address this challenge, we introduce the near-field radar model, which considers various migration elements in range, radial velocity, and Doppler along time and space. Conventionally, these migration effects result in smearing of the likelihood function for estimating the target parameters. However, if the model is correctly specified, these migration effects are informative for tangential velocity estimation. We conduct an identifiability analysis for tangential velocity estimation using the Cram\'er-Rao bound and ambiguity function. The insights from this study motivate the use of a separated array configuration and the development of a computationally efficient maximum likelihood based algorithm designed to utilize target migrations for tangential velocity estimation, while maintaining practical computational complexity. In addition to tangential velocity estimation, the proposed algorithm mitigates likelihood smearing in range, radial velocity, and Doppler. Simulations validate the theoretical feasibility study, and evaluate the algorithms' performance in both single- and multi-target scenarios. The proposed approach improves the accuracy and reliability of automotive radars, enhancing situational awareness for advanced driver assistance systems and autonomous vehicles.
RGBX-DiffusionDet: A Framework for Multi-Modal RGB-X Object Detection Using DiffusionDet
May 05, 2025This work introduces RGBX-DiffusionDet, an object detection framework extending the DiffusionDet model to fuse the heterogeneous 2D data (X) with RGB imagery via an adaptive multimodal encoder. To enable cross-modal interaction, we design the dynamic channel reduction within a convolutional block attention module (DCR-CBAM), which facilitates cross-talk between subnetworks by dynamically highlighting salient channel features. Furthermore, the dynamic multi-level aggregation block (DMLAB) is proposed to refine spatial feature representations through adaptive multiscale fusion. Finally, novel regularization losses that enforce channel saliency and spatial selectivity are introduced, leading to compact and discriminative feature embeddings. Extensive experiments using RGB-Depth (KITTI), a novel annotated RGB-Polarimetric dataset, and RGB-Infrared (M$^3$FD) benchmark dataset were conducted. We demonstrate consistent superiority of the proposed approach over the baseline RGB-only DiffusionDet. The modular architecture maintains the original decoding complexity, ensuring efficiency. These results establish the proposed RGBX-DiffusionDet as a flexible multimodal object detection approach, providing new insights into integrating diverse 2D sensing modalities into diffusion-based detection pipelines.
A Hybrid Approach for Extending Automotive Radar Operation to NLOS Urban Scenarios
Mar 07, 2025



Automotive radar is a key component of sensing suites in autonomous driving (AD) and advanced driver-assist systems (ADAS). However, limited line-of-sight (LOS) significantly reduces radar efficiency in dense urban environments. Therefore, automotive radars need to extend their capabilities beyond LOS by localizing occluding and reflective surfaces and non-line-of-sight (NLOS) targets. This work addresses the NLOS target localization challenge by revisiting the NLOS radar signal propagation model and introducing a hybrid localization approach. The proposed approach first detects and localizes reflective surfaces, then identifies the LOS/NLOS propagation conditions, and finally localizes the target without prior scene knowledge, without using Doppler information, and without any auxiliary sensors. The proposed hybrid approach addresses the computational complexity challenge by integrating a physical radar electromagnetic wave propagation model with a deep neural network (DNN) to estimate occluding surface parameters. The efficiency of the proposed approach to localize the NLOS targets and to identify the NLOS/LOS propagation conditions is evaluated via simulations in a broad range of realistic automotive scenarios. Extending automotive radar sensing beyond LOS is expected to enhance the safety and reliability of autonomous and ADAS-equipped vehicles.
SuperResolution Radar Gesture Recognitio
Nov 23, 2024



"This work has been submitted to the IEEE for possible publication. Copyright may be transferred without notice, after which this version may no longer be accessible." Driver's interaction with a vehicle via automatic gesture recognition is expected to enhance driving safety by decreasing driver's distraction. Optical and infrared-based gesture recognition systems are limited by occlusions, poor lighting, and varying thermal conditions and, therefore, have limited performance in practical in-cabin applications. Radars are insensitive to lighting or thermal conditions and, therefore, are more suitable for in-cabin applications. However, the spatial resolution of conventional radars is insufficient for accurate gesture recognition. The main objective of this research is to derive an accurate gesture recognition approach using low-resolution radars with deep learning-based super-resolution processing. The main idea is to reconstruct high-resolution information from the radar's low-resolution measurements. The major challenge is the derivation of the real-time processing approach. The proposed approach combines conventional signal processing and deep learning methods. The radar echoes are arranged in 3D data cubes and processed using a super-resolution model to enhance range and Doppler resolution. The FFT is used to generate the range-Doppler maps, which enter the deep neural network for efficient gesture recognition. The preliminary results demonstrated the proposed approach's efficiency in achieving high gesture recognition performance using conventional low-resolution radars.
Enhanced Automotive Object Detection via RGB-D Fusion in a DiffusionDet Framework
Jun 05, 2024Vision-based autonomous driving requires reliable and efficient object detection. This work proposes a DiffusionDet-based framework that exploits data fusion from the monocular camera and depth sensor to provide the RGB and depth (RGB-D) data. Within this framework, ground truth bounding boxes are randomly reshaped as part of the training phase, allowing the model to learn the reverse diffusion process of noise addition. The system methodically enhances a randomly generated set of boxes at the inference stage, guiding them toward accurate final detections. By integrating the textural and color features from RGB images with the spatial depth information from the LiDAR sensors, the proposed framework employs a feature fusion that substantially enhances object detection of automotive targets. The $2.3$ AP gain in detecting automotive targets is achieved through comprehensive experiments using the KITTI dataset. Specifically, the improved performance of the proposed approach in detecting small objects is demonstrated.
MCRB on DOA Estimation for Automotive MIMO Radar in the Presence of Multipath
May 11, 2023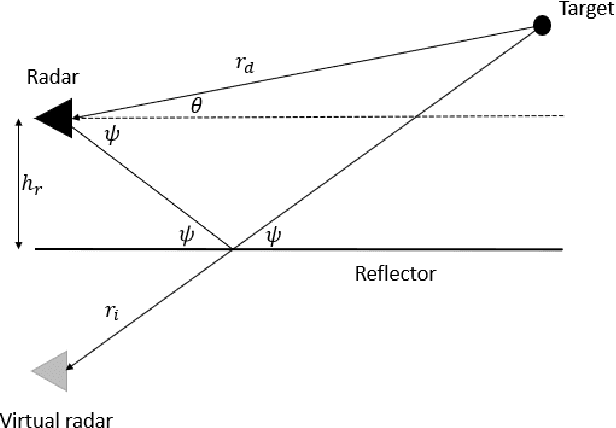
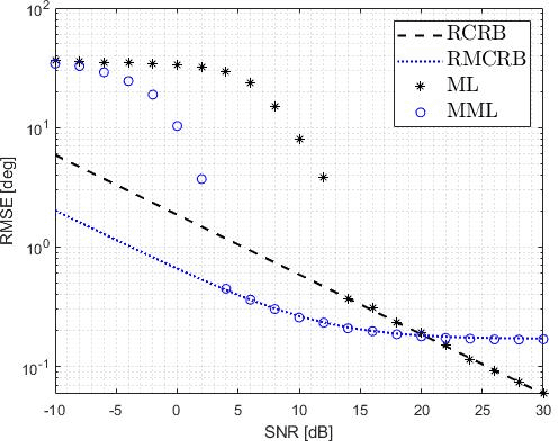
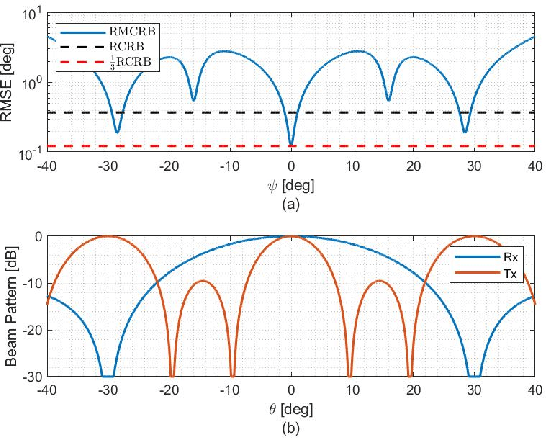
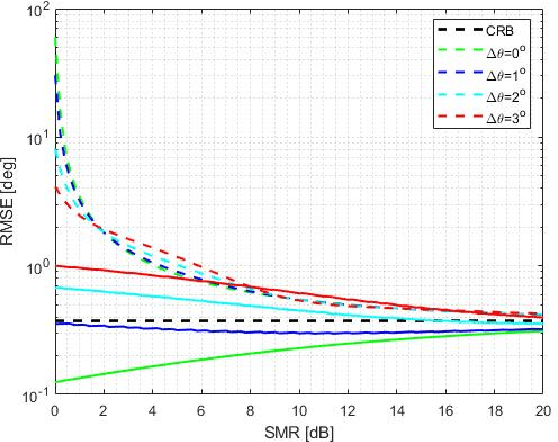
Autonomous driving and advanced active safety features require accurate high-resolution sensing capabilities. Automotive radars are the key component of the vehicle sensing suit. However, when these radars operate in proximity to flat surfaces, such as roads and guardrails, they experience a multipath phenomenon that can degrade the accuracy of the direction-of-arrival (DOA) estimation. Presence of multipath leads to misspecification in the radar data model, resulting in estimation performance degradation, which cannot be reliably predicted by conventional performance bounds. In this paper, the misspecified Cram\'er-Rao bound (MCRB), which accounts for model misspecification, is derived for the problem of DOA estimation in the presence of multipath which is ignored by the estimator. Analytical relations between the MCRB and the Cram\'er-Rao bound are established, and the DOA estimation performance degradation due to multipath is investigated. The results show that the MCRB reliably predicts the asymptotic performance of the misspecified maximum-likelihood estimator and therefore, can serve as an efficient tool for automotive radar performance evaluation and system design.
Neural Network-Based DOA Estimation in the Presence of Non-Gaussian Interference
Jan 07, 2023
This work addresses the problem of direction-of-arrival (DOA) estimation in the presence of non-Gaussian, heavy-tailed, and spatially-colored interference. Conventionally, the interference is considered to be Gaussian-distributed and spatially white. However, in practice, this assumption is not guaranteed, which results in degraded DOA estimation performance. Maximum likelihood DOA estimation in the presence of non-Gaussian and spatially colored interference is computationally complex and not practical. Therefore, this work proposes a neural network (NN) based DOA estimation approach for spatial spectrum estimation in multi-source scenarios with a-priori unknown number of sources in the presence of non-Gaussian spatially-colored interference. The proposed approach utilizes a single NN instance for simultaneous source enumeration and DOA estimation. It is shown via simulations that the proposed approach significantly outperforms conventional and NN-based approaches in terms of probability of resolution, estimation accuracy, and source enumeration accuracy in conditions of low SIR, small sample support, and when the angular separation between the source DOAs and the spatially-colored interference is small.
Deep Radar Detector
Jun 26, 2019



While camera and LiDAR processing have been revolutionized since the introduction of deep learning, radar processing still relies on classical tools. In this paper, we introduce a deep learning approach for radar processing, working directly with the radar complex data. To overcome the lack of radar labeled data, we rely in training only on the radar calibration data and introduce new radar augmentation techniques. We evaluate our method on the radar 4D detection task and demonstrate superior performance compared to the classical approaches while keeping real-time performance. Applying deep learning on radar data has several advantages such as eliminating the need for an expensive radar calibration process each time and enabling classification of the detected objects with almost zero-overhead.