 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStacked Universal Successor Feature Approximators for Safety in Reinforcement Learning
Sep 06, 2024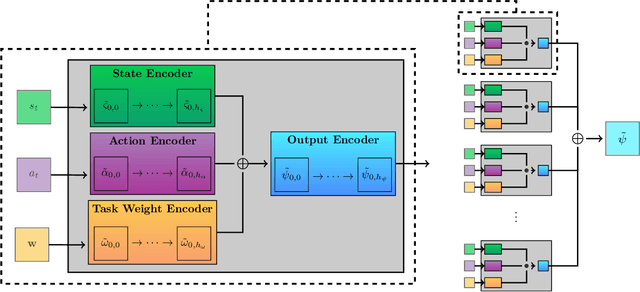
Real-world problems often involve complex objective structures that resist distillation into reinforcement learning environments with a single objective. Operation costs must be balanced with multi-dimensional task performance and end-states' effects on future availability, all while ensuring safety for other agents in the environment and the reinforcement learning agent itself. System redundancy through secondary backup controllers has proven to be an effective method to ensure safety in real-world applications where the risk of violating constraints is extremely high. In this work, we investigate the utility of a stacked, continuous-control variation of universal successor feature approximation (USFA) adapted for soft actor-critic (SAC) and coupled with a suite of secondary safety controllers, which we call stacked USFA for safety (SUSFAS). Our method improves performance on secondary objectives compared to SAC baselines using an intervening secondary controller such as a runtime assurance (RTA) controller.