 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTDM: Trustworthy Decision-Making via Interpretability Enhancement
Aug 13, 2021

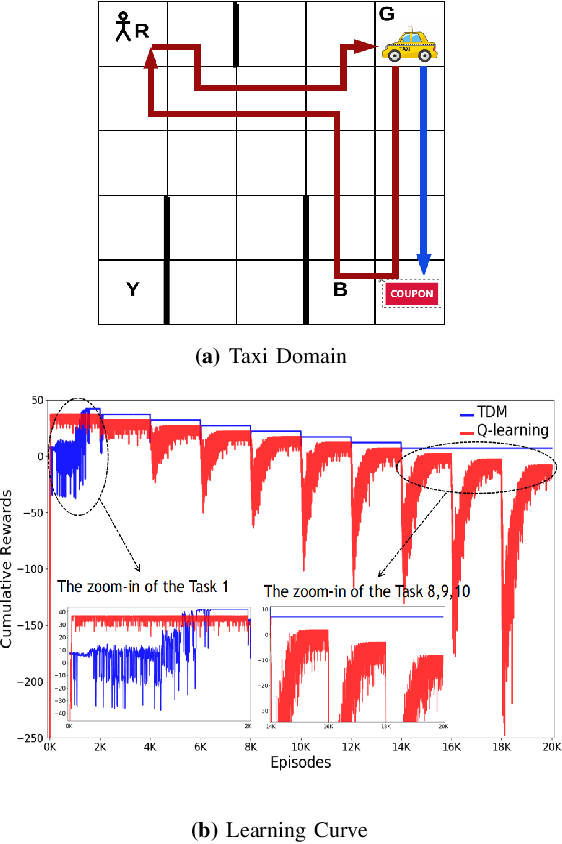

Human-robot interactive decision-making is increasingly becoming ubiquitous, and trust is an influential factor in determining the reliance on autonomy. However, it is not reasonable to trust systems that are beyond our comprehension, and typical machine learning and data-driven decision-making are black-box paradigms that impede interpretability. Therefore, it is critical to establish computational trustworthy decision-making mechanisms enhanced by interpretability-aware strategies. To this end, we propose a Trustworthy Decision-Making (TDM) framework, which integrates symbolic planning into sequential decision-making. The framework learns interpretable subtasks that result in a complex, higher-level composite task that can be formally evaluated using the proposed trust metric. TDM enables the subtask-level interpretability by design and converges to an optimal symbolic plan from the learned subtasks. Moreover, a TDM-based algorithm is introduced to demonstrate the unification of symbolic planning with other sequential-decision making algorithms, reaping the benefits of both. Experimental results validate the effectiveness of trust-score-based planning while improving the interpretability of subtasks.