 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRidge Estimation-Based Vision and Laser Ranging Fusion Localization Method for UAVs
Dec 18, 2025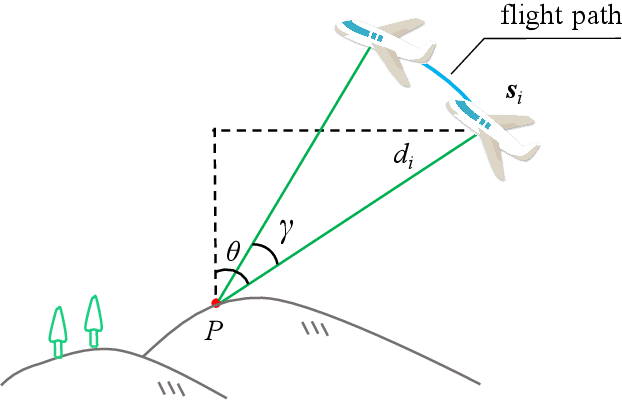
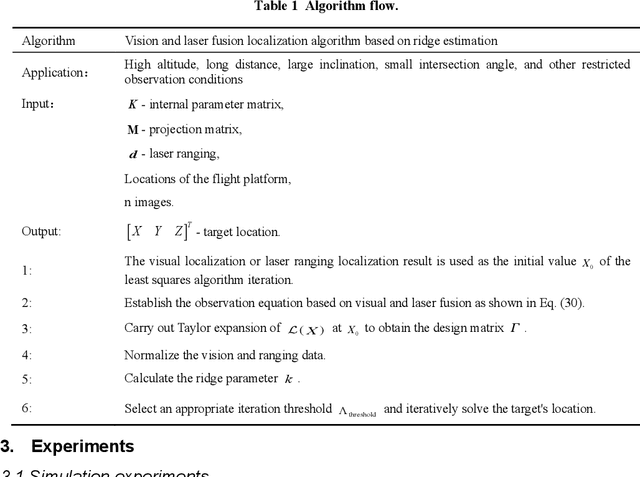
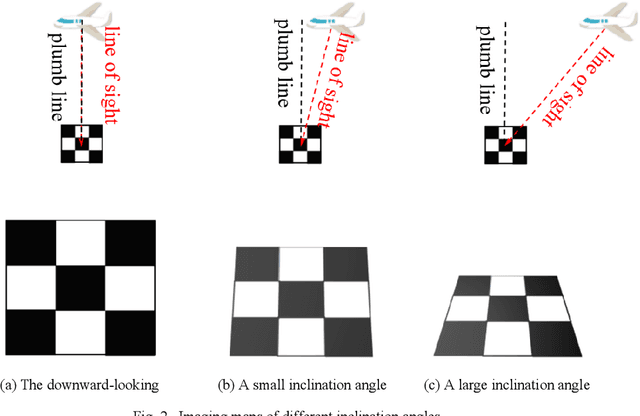
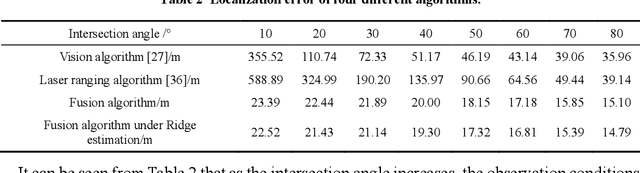
Tracking and measuring targets using a variety of sensors mounted on UAVs is an effective means to quickly and accurately locate the target. This paper proposes a fusion localization method based on ridge estimation, combining the advantages of rich scene information from sequential imagery with the high precision of laser ranging to enhance localization accuracy. Under limited conditions such as long distances, small intersection angles, and large inclination angles, the column vectors of the design matrix have serious multicollinearity when using the least squares estimation algorithm. The multicollinearity will lead to ill-conditioned problems, resulting in significant instability and low robustness. Ridge estimation is introduced to mitigate the serious multicollinearity under the condition of limited observation. Experimental results demonstrate that our method achieves higher localization accuracy compared to ground localization algorithms based on single information. Moreover, the introduction of ridge estimation effectively enhances the robustness, particularly under limited observation conditions.
3D Trajectory Reconstruction of Moving Points Based on a Monocular Camera
Feb 27, 2025



The motion measurement of point targets constitutes a fundamental problem in photogrammetry, with extensive applications across various engineering domains. Reconstructing a point's 3D motion just from the images captured by only a monocular camera is unfeasible without prior assumptions. Under limited observation conditions such as insufficient observations, long distance, and high observation error of platform, the least squares estimation faces the issue of ill-conditioning. This paper presents an algorithm for reconstructing 3D trajectories of moving points using a monocular camera. The motion of the points is represented through temporal polynomials. Ridge estimation is introduced to mitigate the issues of ill-conditioning caused by limited observation conditions. Then, an automatic algorithm for determining the order of the temporal polynomials is proposed. Furthermore, the definition of reconstructability for temporal polynomials is proposed to describe the reconstruction accuracy quantitatively. The simulated and real-world experimental results demonstrate the feasibility, accuracy, and efficiency of the proposed method.