 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrust-based Symbolic Motion Planning for Multi-robot Bounding Overwatch
Jan 06, 2022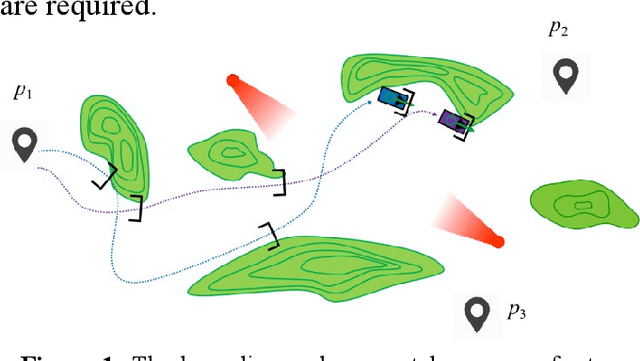
Multi-robot bounding overwatch requires timely coordination of robot team members. Symbolic motion planning (SMP) can provide provably correct solutions for robot motion planning with high-level temporal logic task requirements. This paper aims to develop a framework for safe and reliable SMP of multi-robot systems (MRS) to satisfy complex bounding overwatch tasks constrained by temporal logics. A decentralized SMP framework is first presented, which guarantees both correctness and parallel execution of the complex bounding overwatch tasks by the MRS. A computational trust model is then constructed by referring to the traversability and line of sight of robots in the terrain. The trust model predicts the trustworthiness of each robot team's potential behavior in executing a task plan. The most trustworthy task and motion plan is explored with a Dijkstra searching strategy to guarantee the reliability of MRS bounding overwatch. A robot simulation is implemented in ROS Gazebo to demonstrate the effectiveness of the proposed framework.
Bayesian Optimization Based Trustworthiness Model for Multi-robot Bounding Overwatch
Jan 06, 2022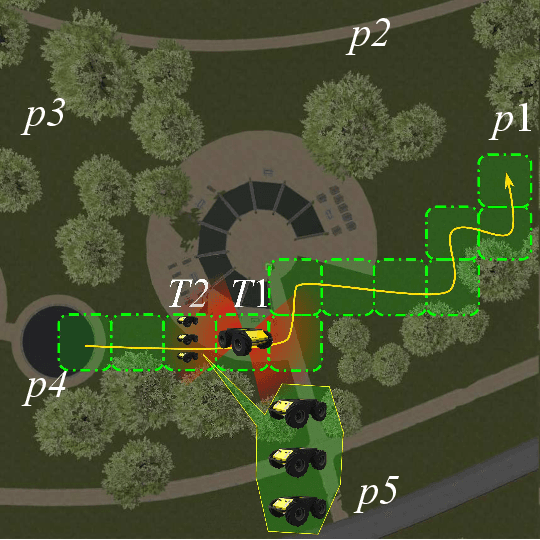
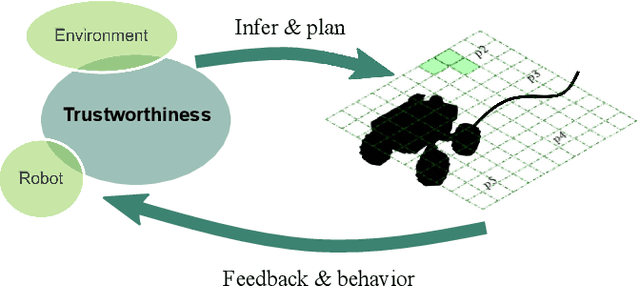
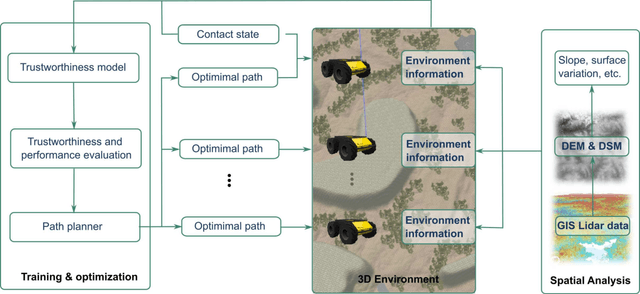
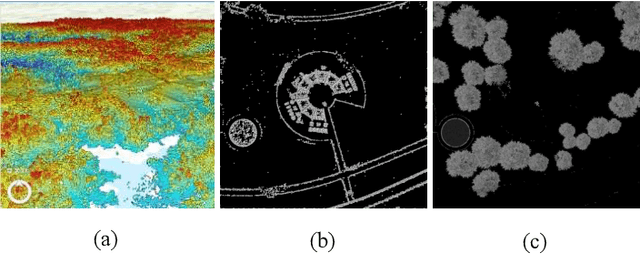
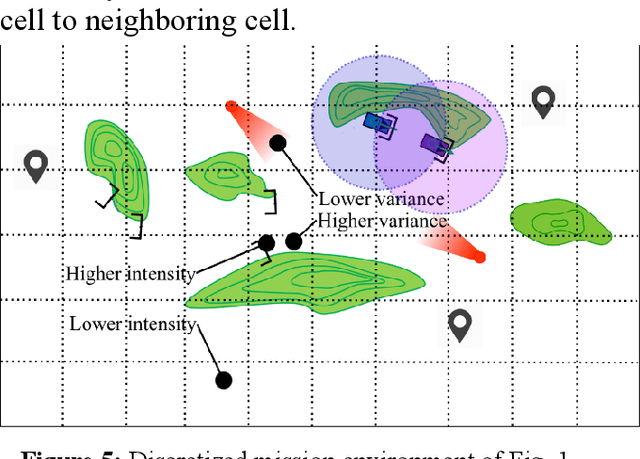
In multi-robot system (MRS) bounding overwatch, it is crucial to determine which point to choose for overwatch at each step and whether the robots' positions are trustworthy so that the overwatch can be performed effectively. In this paper, we develop a Bayesian optimization based computational trustworthiness model (CTM) for the MRS to select overwatch points. The CTM can provide real-time trustworthiness evaluation for the MRS on the overwatch points by referring to the robots' situational awareness information, such as traversability and line of sight. The evaluation can quantify each robot's trustworthiness in protecting its robot team members during the bounding overwatch. The trustworthiness evaluation can generate a dynamic cost map for each robot in the workspace and help obtain the most trustworthy bounding overwatch path. Our proposed Bayesian based CTM and motion planning can reduce the number of explorations for the workspace in data collection and improve the CTM learning efficiency. It also enables the MRS to deal with the dynamic and uncertain environments for the multi-robot bounding overwatch task. A robot simulation is implemented in ROS Gazebo to demonstrate the effectiveness of the proposed framework.
Human-Robot Trust Integrated Task Allocation and Symbolic Motion planning for Heterogeneous Multi-robot Systems
Oct 26, 2018



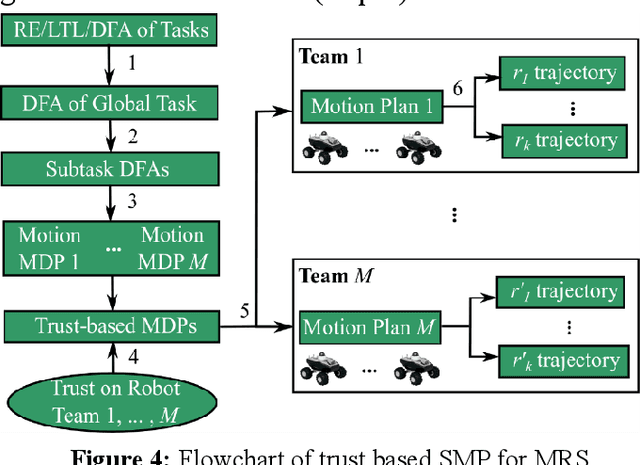
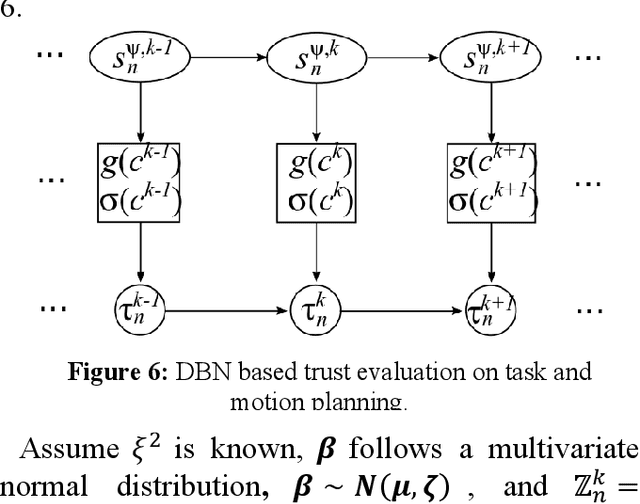
This paper presents a human-robot trust integrated task allocation and motion planning framework for multi-robot systems (MRS) in performing a set of tasks concurrently. A set of task specifications in parallel are conjuncted with MRS to synthesize a task allocation automaton. Each transition of the task allocation automaton is associated with the total trust value of human in corresponding robots. Here, the human-robot trust model is constructed with a dynamic Bayesian network (DBN) by considering individual robot performance, safety coefficient, human cognitive workload and overall evaluation of task allocation. Hence, a task allocation path with maximum encoded human-robot trust can be searched based on the current trust value of each robot in the task allocation automaton. Symbolic motion planning (SMP) is implemented for each robot after they obtain the sequence of actions. The task allocation path can be intermittently updated with this DBN based trust model. The overall strategy is demonstrated by a simulation with 5 robots and 3 parallel subtask automata.
Trust-based Multi-Robot Symbolic Motion Planning with a Human-in-the-Loop
Aug 15, 2018



Symbolic motion planning for robots is the process of specifying and planning robot tasks in a discrete space, then carrying them out in a continuous space in a manner that preserves the discrete-level task specifications. Despite progress in symbolic motion planning, many challenges remain, including addressing scalability for multi-robot systems and improving solutions by incorporating human intelligence. In this paper, distributed symbolic motion planning for multi-robot systems is developed to address scalability. More specifically, compositional reasoning approaches are developed to decompose the global planning problem, and atomic propositions for observation, communication, and control are proposed to address inter-robot collision avoidance. To improve solution quality and adaptability, a dynamic, quantitative, and probabilistic human-to-robot trust model is developed to aid this decomposition. Furthermore, a trust-based real-time switching framework is proposed to switch between autonomous and manual motion planning for tradeoffs between task safety and efficiency. Deadlock- and livelock-free algorithms are designed to guarantee reachability of goals with a human-in-the-loop. A set of non-trivial multi-robot simulations with direct human input and trust evaluation are provided demonstrating the successful implementation of the trust-based multi-robot symbolic motion planning methods.
* 33 pages, 21 figures