 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinsight: A Fingertip-Sized Vision-Based Tactile Sensor for Robotic Manipulation
Apr 21, 2023Intelligent interaction with the physical world requires perceptual abilities beyond vision and hearing; vibrant tactile sensing is essential for autonomous robots to dexterously manipulate unfamiliar objects or safely contact humans. Therefore, robotic manipulators need high-resolution touch sensors that are compact, robust, inexpensive, and efficient. The soft vision-based haptic sensor presented herein is a miniaturized and optimized version of the previously published sensor Insight. Minsight has the size and shape of a human fingertip and uses machine learning methods to output high-resolution maps of 3D contact force vectors at 60 Hz. Experiments confirm its excellent sensing performance, with a mean absolute force error of 0.07 N and contact location error of 0.6 mm across its surface area. Minsight's utility is shown in two robotic tasks on a 3-DoF manipulator. First, closed-loop force control enables the robot to track the movements of a human finger based only on tactile data. Second, the informative value of the sensor output is shown by detecting whether a hard lump is embedded within a soft elastomer with an accuracy of 98%. These findings indicate that Minsight can give robots the detailed fingertip touch sensing needed for dexterous manipulation and physical human-robot interaction.
A soft thumb-sized vision-based sensor with accurate all-round force perception
Nov 10, 2021
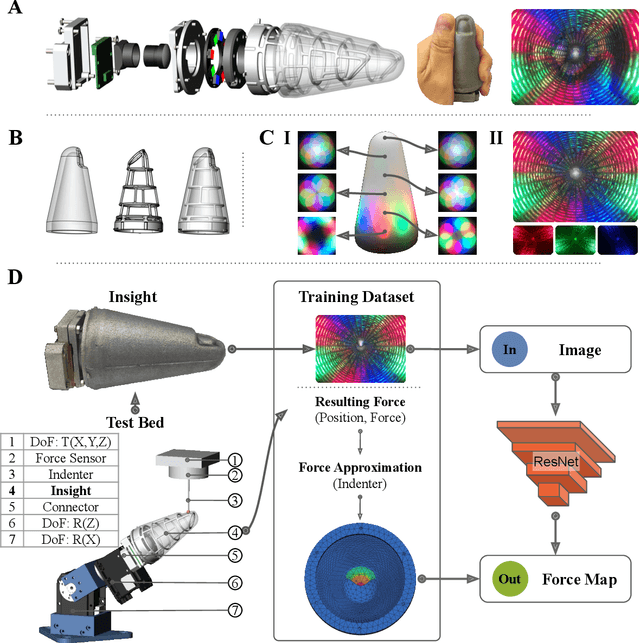
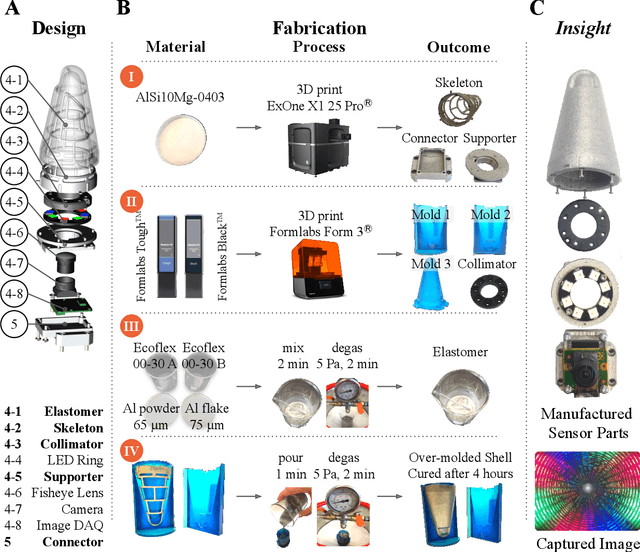

Vision-based haptic sensors have emerged as a promising approach to robotic touch due to affordable high-resolution cameras and successful computer-vision techniques. However, their physical design and the information they provide do not yet meet the requirements of real applications. We present a robust, soft, low-cost, vision-based, thumb-sized 3D haptic sensor named Insight: it continually provides a directional force-distribution map over its entire conical sensing surface. Constructed around an internal monocular camera, the sensor has only a single layer of elastomer over-molded on a stiff frame to guarantee sensitivity, robustness, and soft contact. Furthermore, Insight is the first system to combine photometric stereo and structured light using a collimator to detect the 3D deformation of its easily replaceable flexible outer shell. The force information is inferred by a deep neural network that maps images to the spatial distribution of 3D contact force (normal and shear). Insight has an overall spatial resolution of 0.4 mm, force magnitude accuracy around 0.03 N, and force direction accuracy around 5 degrees over a range of 0.03--2 N for numerous distinct contacts with varying contact area. The presented hardware and software design concepts can be transferred to a wide variety of robot parts.
Theory of Geometric Super-resolution for Haptic Sensor Design
May 25, 2021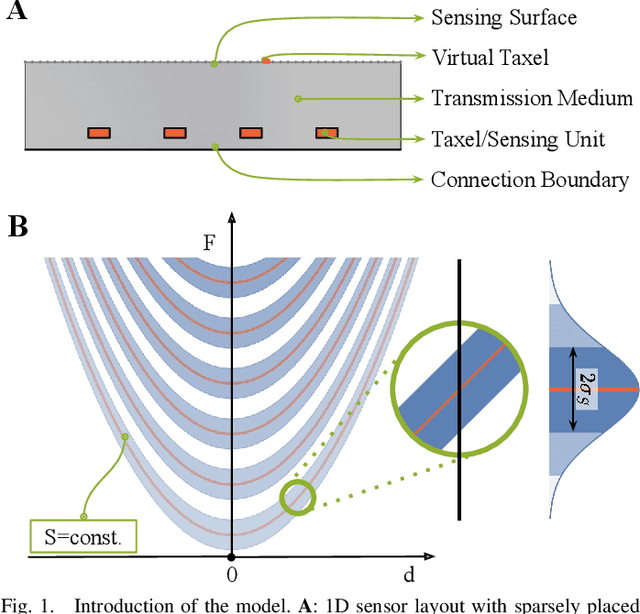
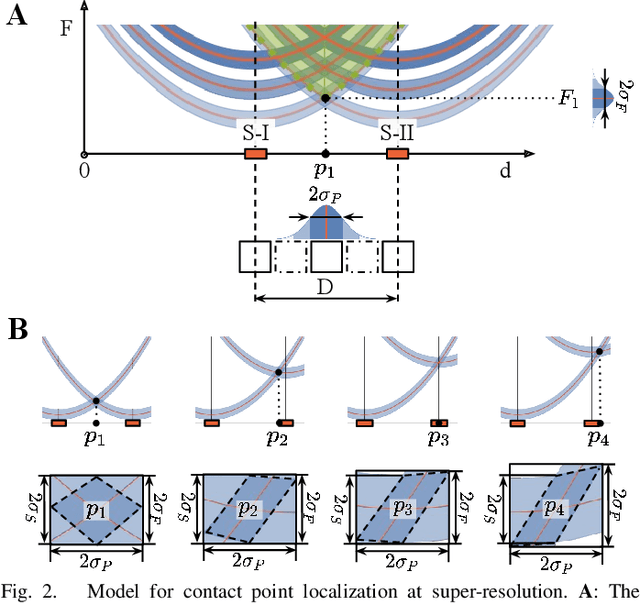
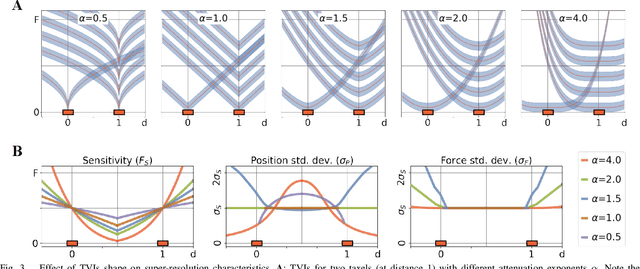
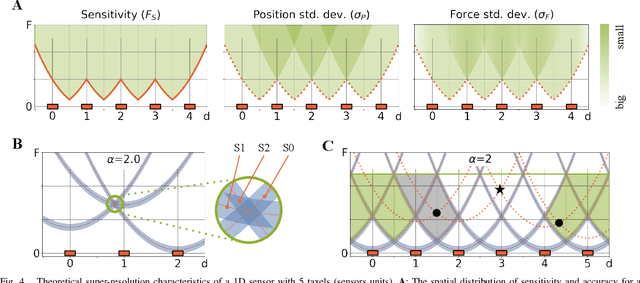
Haptic feedback is important to make robots more dexterous and effective. High-resolution haptic sensors are still not widely available, and their application is often bound by robustness issues. A route towards high-resolution and robust sensors is to embed a few sensor units (taxels) into a flexible surface material and use signal processing to achieve sensing with super-resolution accuracy. We propose a theory for geometric super-resolution to guide the development of haptic sensors of this kind. This theory is based on sensor isolines and allows us to predict force sensitivity and accuracy in force magnitude and contact position as a spatial quantity. We evaluate the influence of different factors, such as the elastic properties of the material, using finite element simulations. We compare three representative real sensor unit types, empirically determine their isolines, and validate the theory in a custom-built sensor. Using machine learning techniques, we obtain an average super-resolution factor of 300. As we illustrate, our theory can guide future haptic sensor designs and inform various design choices.
Robust Affordable 3D Haptic Sensation via Learning Deformation Patterns
Feb 25, 2019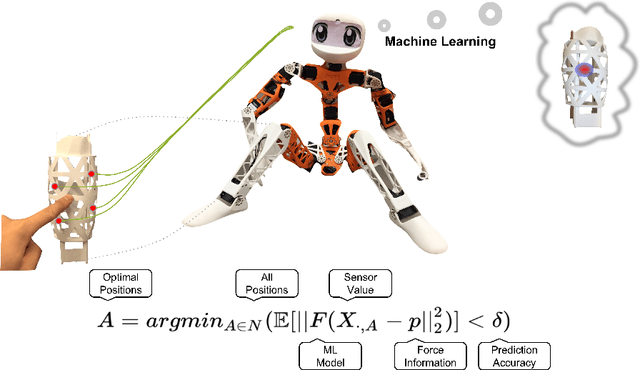
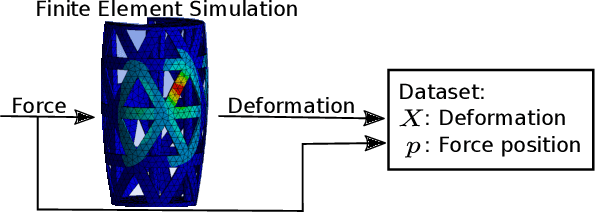
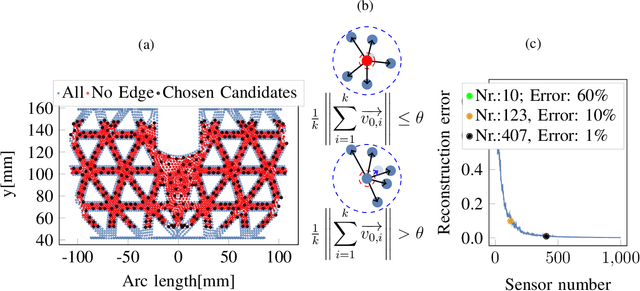
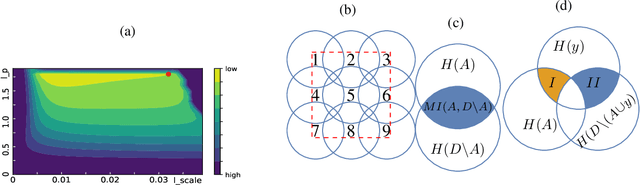
Haptic sensation is an important modality for interacting with the real world. This paper proposes a general framework of inferring haptic forces on the surface of a 3D structure from internal deformations using a small number of physical sensors instead of employing dense sensor arrays. Using machine learning techniques, we optimize the sensor number and their placement and are able to obtain high-precision force inference for a robotic limb using as few as 9 sensors. For the optimal and sparse placement of the measurement units (strain gauges), we employ data-driven methods based on data obtained by finite element simulation. We compare data-driven approaches with model-based methods relying on geometric distance and information criteria such as Entropy and Mutual Information. We validate our approach on a modified limb of the Poppy robot and obtain 8 mm localization precision.