 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety Anchor: Defending Harmful Fine-tuning via Geometric Bottlenecks
May 07, 2026The safety alignment of Large Language Models (LLMs) remains vulnerable to Harmful Fine-tuning (HFT). While existing defenses impose constraints on parameters, gradients, or internal representations, we observe that they can be effectively circumvented under persistent HFT. Our analysis traces this failure to the inherent redundancy of the high-dimensional parameter space: attackers exploit optimization trajectories that are orthogonal to defense constraints to restore harmful capabilities while deceptively adhering to safety restrictions. To address this, we propose Safety Bottleneck Regularization (SBR). SBR shifts the defensive focus from the redundant parameter space to the unembedding layer, which serves as a geometric bottleneck. By anchoring the final hidden states of harmful queries to those of the safety-aligned model, SBR enables the model to maintain safe responses even under persistent HFT. Extensive experiments confirm SBR's effectiveness, demonstrating that utilizing just a single safety anchor is sufficient to reduce the Harmful Score to $<$10 while preserving competitive performance on benign downstream tasks.
A Wind-Aware Path Planning Method for UAV-Asisted Bridge Inspection
Jan 19, 2024In response to the gap in considering wind conditions in the bridge inspection using unmanned aerial vehicle (UAV) , this paper proposes a path planning method for UAVs that takes into account the influence of wind, based on the simulated annealing algorithm. The algorithm considers the wind factors, including the influence of different wind speeds and directions at the same time on the path planning of the UAV. Firstly, An environment model is constructed specifically for UAV bridge inspection, taking into account the various objective functions and constraint conditions of UAVs. A more sophisticated and precise mathematical model is then developed based on this environmental model to enable efficient and effective UAV path planning. Secondly, the bridge separation planning model is applied in a novel way, and a series of parameters are simulated, including the adjustment of the initial temperature value. The experimental results demonstrate that, compared with traditional local search algorithms, the proposed method achieves a cost reduction of 30.05\% and significantly improves effectiveness. Compared to path planning methods that do not consider wind factors, the proposed approach yields more realistic and practical results for UAV applications, as demonstrated by its improved effectiveness in simulations. These findings highlight the value of our method in facilitating more accurate and efficient UAV path planning in wind-prone environments.
Generating Unrestricted 3D Adversarial Point Clouds
Nov 19, 2021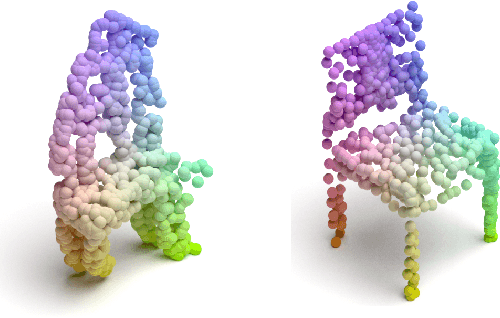
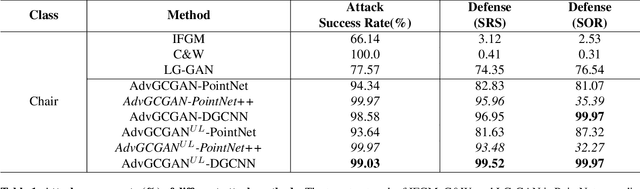
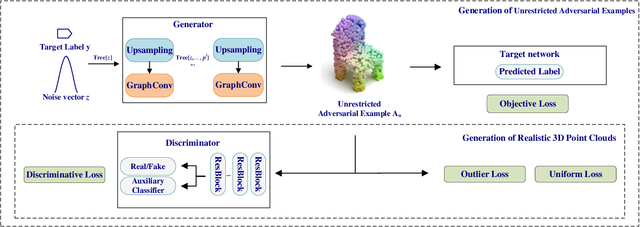
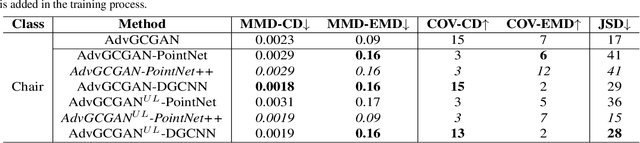
Utilizing 3D point cloud data has become an urgent need for the deployment of artificial intelligence in many areas like facial recognition and self-driving. However, deep learning for 3D point clouds is still vulnerable to adversarial attacks, e.g., iterative attacks, point transformation attacks, and generative attacks. These attacks need to restrict perturbations of adversarial examples within a strict bound, leading to the unrealistic adversarial 3D point clouds. In this paper, we propose an Adversarial Graph-Convolutional Generative Adversarial Network (AdvGCGAN) to generate visually realistic adversarial 3D point clouds from scratch. Specifically, we use a graph convolutional generator and a discriminator with an auxiliary classifier to generate realistic point clouds, which learn the latent distribution from the real 3D data. The unrestricted adversarial attack loss is incorporated in the special adversarial training of GAN, which enables the generator to generate the adversarial examples to spoof the target network. Compared with the existing state-of-art attack methods, the experiment results demonstrate the effectiveness of our unrestricted adversarial attack methods with a higher attack success rate and visual quality. Additionally, the proposed AdvGCGAN can achieve better performance against defense models and better transferability than existing attack methods with strong camouflage.