 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel-Agnostic Uncertainty Quantification for Fast NFC Tag Identification using RF Fingerprinting
Mar 12, 2025Near Field Communication (NFC) is widely used in security applications such as door access systems and ID cards. However, clone attacks can replicate digital information, enabling unauthorized access. RF fingerprinting offers a robust defense by extracting unique physical-layer features from NFC cards that cannot be cloned. While RF fingerprinting has been extensively applied to Internet of Things (IoT) device authentication, NFC tags present distinct characteristics that require specialized approaches. This paper focuses on RF fingerprinting for the ISO15693 NFC tag, which is a widely used international standard, by leveraging multi-channel, multi-rate data sampling to enhance accuracy. Deep learning and Random Forest models are employed to identify NFC tags, while uncertainty quantification, particularly Conformal Prediction, accelerates the identification process with high confidence and precision. A software-defined radio (SDR) testbed is developed to transmit customized commands and collect multi-channel multi-rate NFC signals. The multi-channel multi-rate NFC signals are progressively collected to ensure fast and accurate identification. Experimental results demonstrate that the proposed system achieves high accuracy by adaptively utilizing the optimal combination of NFC signals. The developed solution is model-agnostic which can be utilized for any machine learning-based NFC tag identification.
Task-Oriented Mulsemedia Communication using Unified Perceiver and Conformal Prediction in 6G Metaverse Systems
May 14, 2024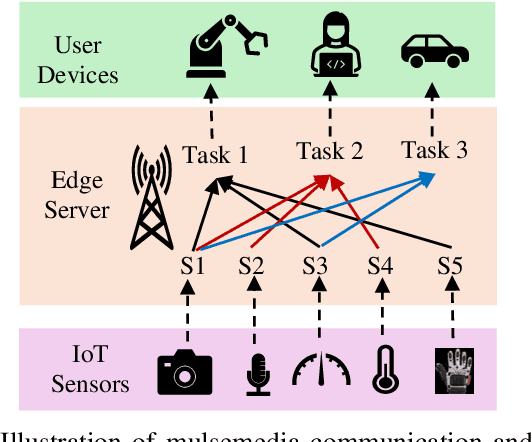
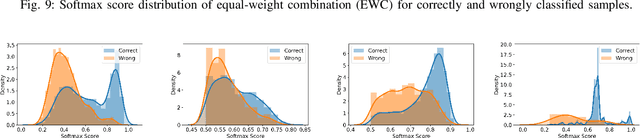
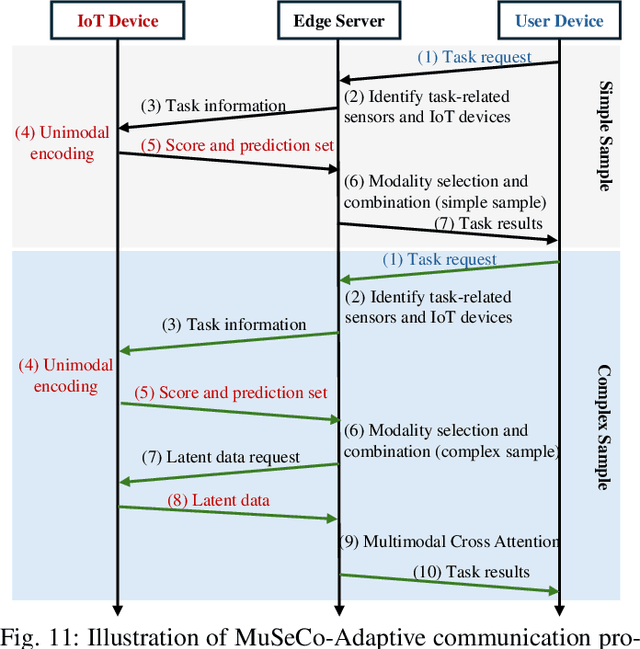
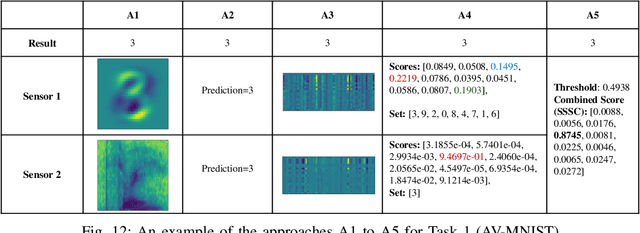
The growing prominence of extended reality (XR), holographic-type communications, and metaverse demands truly immersive user experiences by using many sensory modalities, including sight, hearing, touch, smell, taste, etc. Additionally, the widespread deployment of sensors in areas such as agriculture, manufacturing, and smart homes is generating a diverse array of sensory data. A new media format known as multisensory media (mulsemedia) has emerged, which incorporates a wide range of sensory modalities beyond the traditional visual and auditory media. 6G wireless systems are envisioned to support the internet of senses, making it crucial to explore effective data fusion and communication strategies for mulsemedia. In this paper, we introduce a task-oriented multi-task mulsemedia communication system named MuSeCo, which is developed using unified Perceiver models and Conformal Prediction. This unified model can accept any sensory input and efficiently extract latent semantic features, making it adaptable for deployment across various Artificial Intelligence of Things (AIoT) devices. Conformal Prediction is employed for modality selection and combination, enhancing task accuracy while minimizing data communication overhead. The model has been trained using six sensory modalities across four classification tasks. Simulations and experiments demonstrate that MuSeCo can effectively select and combine sensory modalities, significantly reduce end-to-end communication latency and energy consumption, and maintain high accuracy in communication-constrained systems.
Battery-Free Sensor Array for Wireless Multi-Depth In-Situ Sensing
Jan 21, 2024Underground in-situ sensing plays a vital role in precision agriculture and infrastructure monitoring. While existing sensing systems utilize wires to connect an array of sensors at various depths for spatial-temporal data collection, wireless underground sensor networks offer a cable-free alternative. However, these wireless sensors are typically battery-powered, necessitating periodic recharging or replacement. This paper proposes a battery-free sensor array which can be used for wireless multi-depth in-situ sensing. Utilizing Near Field Communication (NFC)-which can penetrate soil with negligible signal power loss-this sensor array can form a virtual magnetic waveguide, achieving long communication ranges. An analytical model has been developed to offer insights and determine optimal design parameters. Moreover, a prototype, constructed using off-the-shelf NFC sensors, was tested to validate the proposed concept. While this system is primarily designed for underground applications, it holds potential for other multi-depth in-situ sensing scenarios, including underwater environments.
Mobility-Aware Computation Offloading for Swarm Robotics using Deep Reinforcement Learning
Aug 22, 2023Swarm robotics is envisioned to automate a large number of dirty, dangerous, and dull tasks. Robots have limited energy, computation capability, and communication resources. Therefore, current swarm robotics have a small number of robots, which can only provide limited spatio-temporal information. In this paper, we propose to leverage the mobile edge computing to alleviate the computation burden. We develop an effective solution based on a mobility-aware deep reinforcement learning model at the edge server side for computing scheduling and resource. Our results show that the proposed approach can meet delay requirements and guarantee computation precision by using minimum robot energy.