 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA stochastically verifiable autonomous control architecture with reasoning
Nov 10, 2016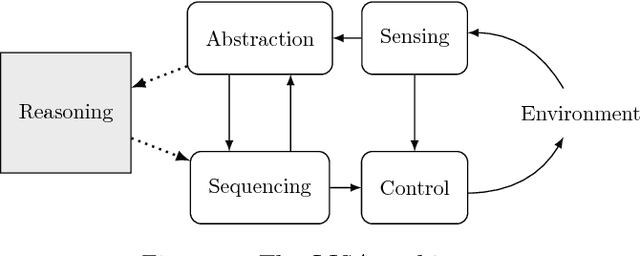

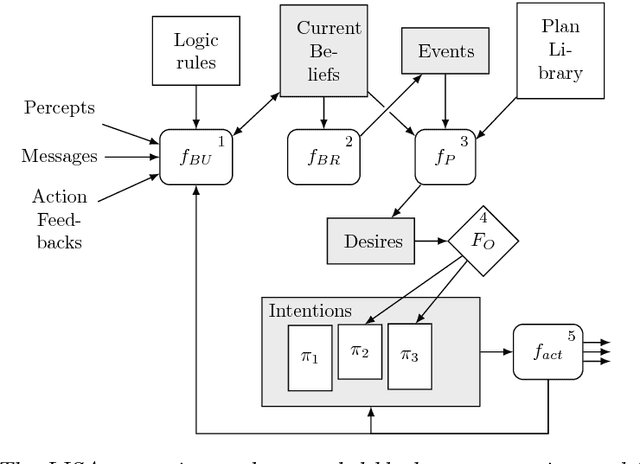

A new agent architecture called Limited Instruction Set Agent (LISA) is introduced for autonomous control. The new architecture is based on previous implementations of AgentSpeak and it is structurally simpler than its predecessors with the aim of facilitating design-time and run-time verification methods. The process of abstracting the LISA system to two different types of discrete probabilistic models (DTMC and MDP) is investigated and illustrated. The LISA system provides a tool for complete modelling of the agent and the environment for probabilistic verification. The agent program can be automatically compiled into a DTMC or a MDP model for verification with Prism. The automatically generated Prism model can be used for both design-time and run-time verification. The run-time verification is investigated and illustrated in the LISA system as an internal modelling mechanism for prediction of future outcomes.
Testing, Verification and Improvements of Timeliness in ROS processes
Nov 10, 2016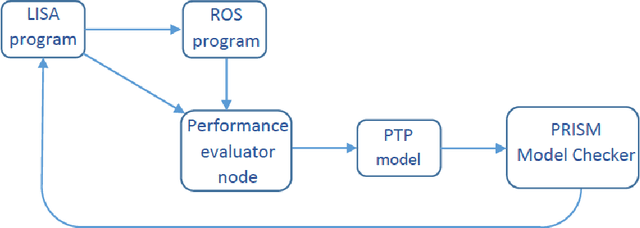
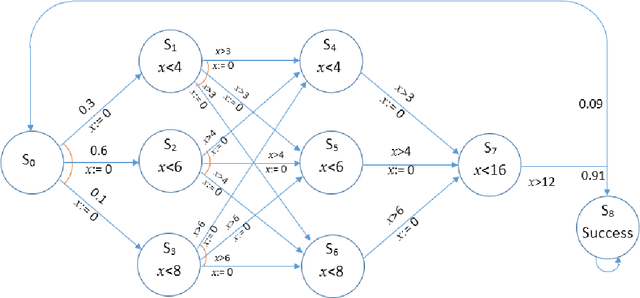
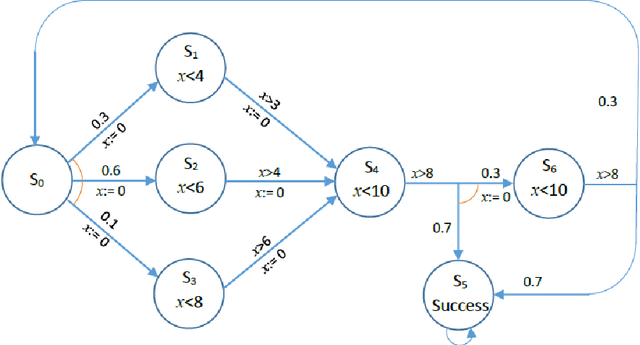
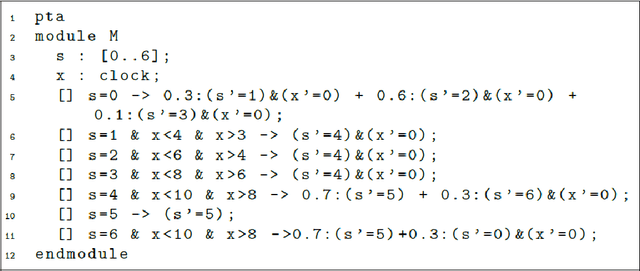
This paper addresses the problem of improving response times of robots implemented in the Robotic Operating System (ROS) using formal verification of computational-time feasibility. In order to verify the real time behaviour of a robot under uncertain signal processing times, methods of formal verification of timeliness properties are proposed for data flows in a ROS-based control system using Probabilistic Timed Programs (PTPs). To calculate the probability of success under certain time limits, and to demonstrate the strength of our approach, a case study is implemented for a robotic agent in terms of operational times verification using the PRISM model checker, which points to possible enhancements to the operation of the robotic agent.
* 13 pages, 4 figures
Verification of Logical Consistency in Robotic Reasoning
Nov 10, 2016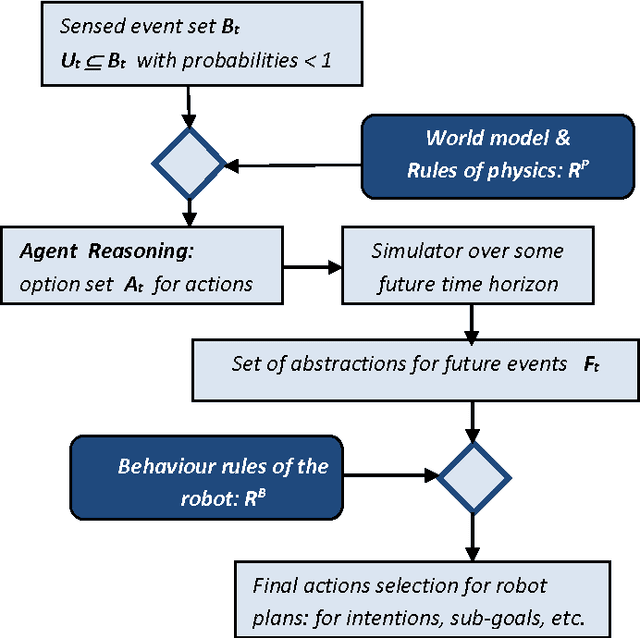
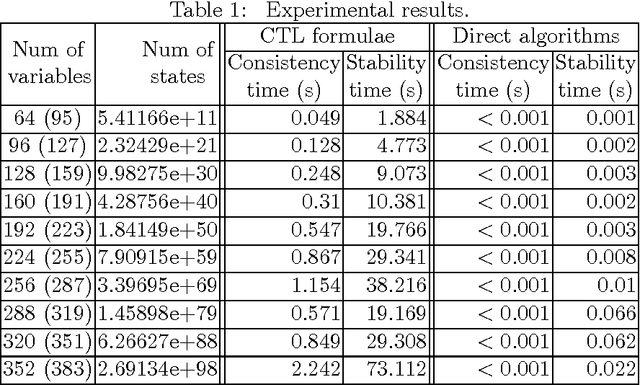
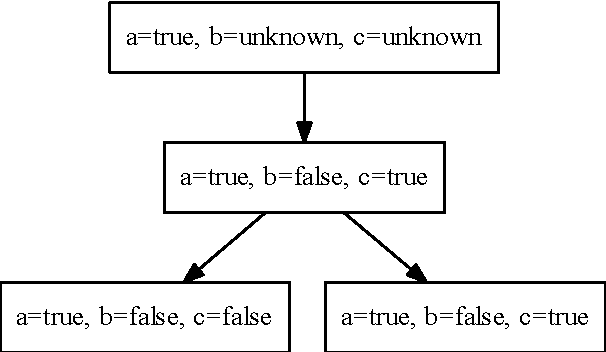
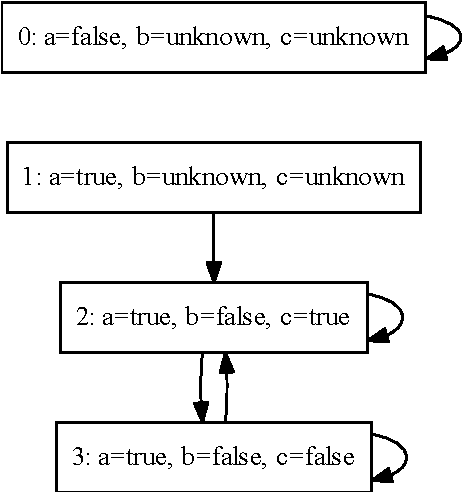
Most autonomous robotic agents use logic inference to keep themselves to safe and permitted behaviour. Given a set of rules, it is important that the robot is able to establish the consistency between its rules, its perception-based beliefs, its planned actions and their consequences. This paper investigates how a robotic agent can use model checking to examine the consistency of its rules, beliefs and actions. A rule set is modelled by a Boolean evolution system with synchronous semantics, which can be translated into a labelled transition system (LTS). It is proven that stability and consistency can be formulated as computation tree logic (CTL) and linear temporal logic (LTL) properties. Two new algorithms are presented to perform realtime consistency and stability checks respectively. Their implementation provides us a computational tool, which can form the basis of efficient consistency checks on-board robots.