Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTesting, Verification and Improvements of Timeliness in ROS processes
Paper and Code
Nov 10, 2016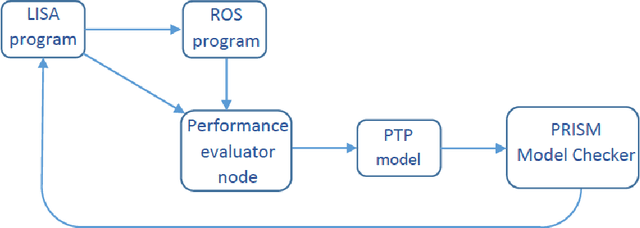
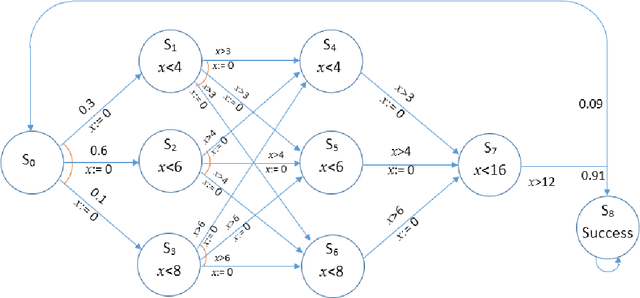
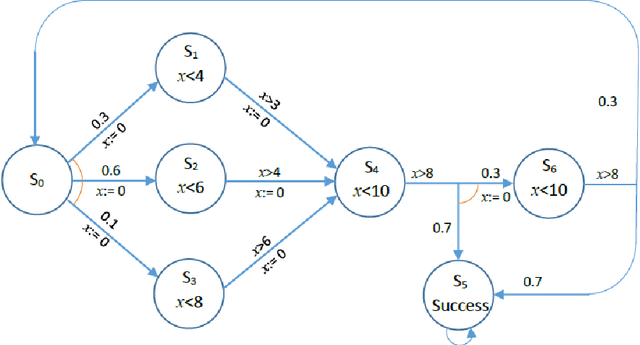
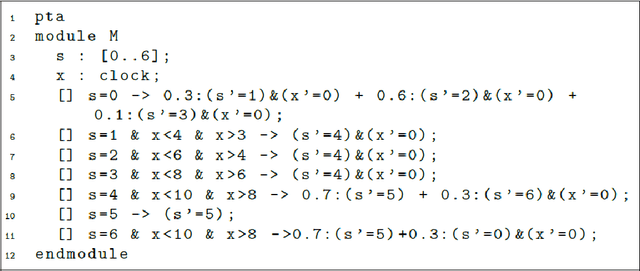
This paper addresses the problem of improving response times of robots implemented in the Robotic Operating System (ROS) using formal verification of computational-time feasibility. In order to verify the real time behaviour of a robot under uncertain signal processing times, methods of formal verification of timeliness properties are proposed for data flows in a ROS-based control system using Probabilistic Timed Programs (PTPs). To calculate the probability of success under certain time limits, and to demonstrate the strength of our approach, a case study is implemented for a robotic agent in terms of operational times verification using the PRISM model checker, which points to possible enhancements to the operation of the robotic agent.
* TAROS Conference, Volume 9716 of the series Lecture Notes in
Computer Science pp 146-157, 2016 * 13 pages, 4 figures
View paper on