 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigation of Enhanced Inertial Navigation Algorithms by Functional Iteration
Feb 12, 2023


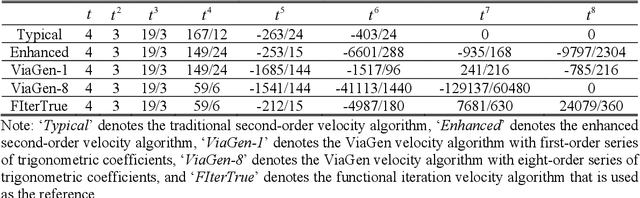
The defects of the traditional strapdown inertial navigation algorithms become well acknowledged and the enhanced traditional algorithms were quite recently proposed trying to mitigate both theoretical and algorithmic defects. In this paper, the accuracies of the traditional algorithms, the enhanced algorithms, and the velocity algorithm based on the velocity translation vector are re-investigated in the common case of two samples, for the first time against the true reference provided by the functional iteration approach that has provable convergence and essentially reduces the noncommutativity errors to machine precision. Notably, the analyses by the help of MATLAB symbolic toolbox reveal the marginal effect of the enhanced algorithms, and the error orders of all algorithms analyzed against functional iteration are consistent with the existing literatures. Numerical results under coning motions agree with analyses that the enhanced algorithms have little significant accuracy improvement over the traditional algorithms, while the functional iteration approach possesses significant accuracy superiority even in sustained lowly dynamic conditions.
iNavFIter-M: Matrix Formulation of Functional Iteration for Inertial Navigation Computation
Nov 17, 2022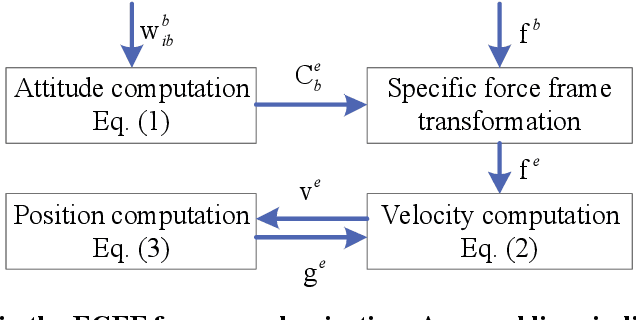
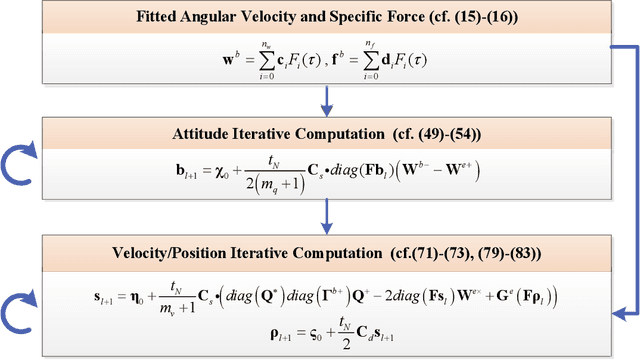
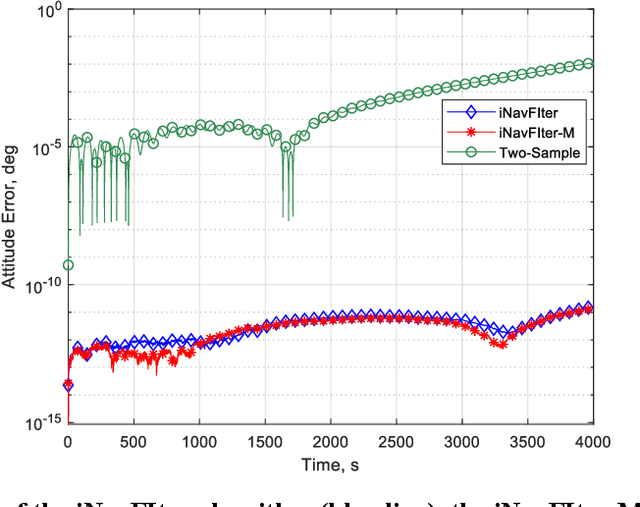
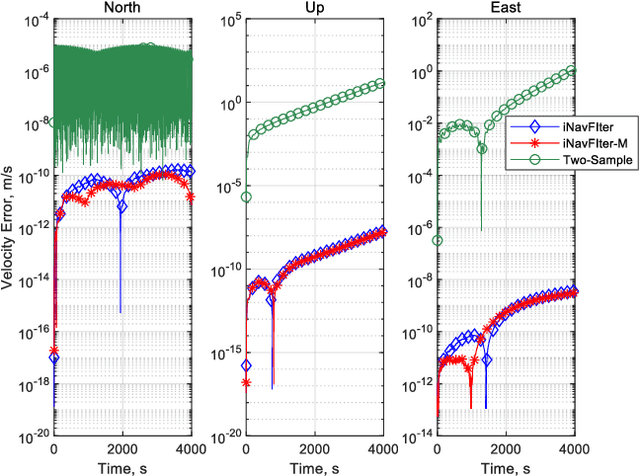
The acquisition of attitude, velocity, and position is an essential task in the field of inertial navigation, achieved by integrating the measurements from inertial sensors. Recently, the ultra-precision inertial navigation computation has been tackled by the functional iteration approach (iNavFIter) that drives the non-commutativity errors almost to the computer truncation error level. This paper proposes a computationally efficient matrix formulation of the functional iteration approach, named the iNavFIter-M. The Chebyshev polynomial coefficients in two consecutive iterations are explicitly connected through the matrix formulation, in contrast to the implicit iterative relationship in the original iNavFIter. By so doing, it allows a straightforward algorithmic implementation and a number of matrix factors can be pre-calculated for more efficient computation. Numerical results demonstrate that the proposed iNavFIter-M algorithm is able to achieve the same high computation accuracy as the original iNavFIter does, at the computational cost comparable to the typical two-sample algorithm. The iNavFIter-M algorithm is also implemented on a FPGA board to demonstrate its potential in real time applications.
Symmetry Detection of Occluded Point Cloud Using Deep Learning
Mar 14, 2020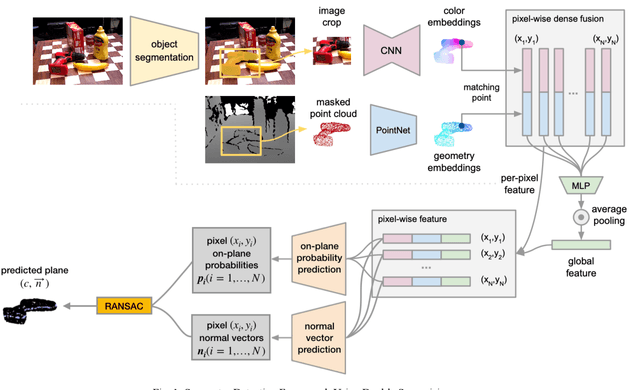

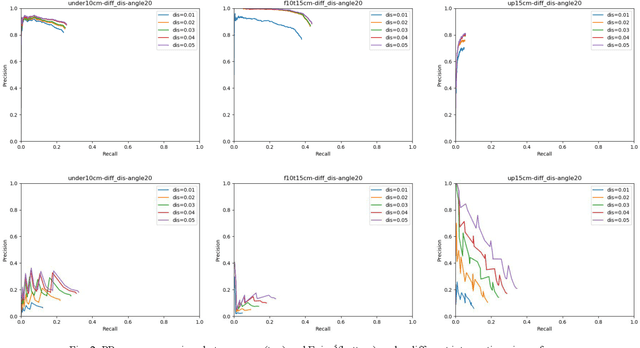
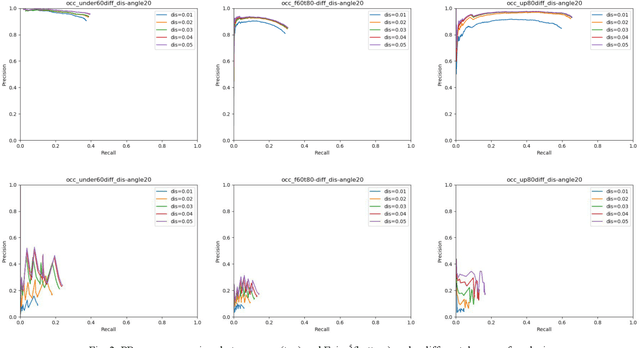
Symmetry detection has been a classical problem in computer graphics, many of which using traditional geometric methods. In recent years, however, we have witnessed the arising deep learning changed the landscape of computer graphics. In this paper, we aim to solve the symmetry detection of the occluded point cloud in a deep-learning fashion. To the best of our knowledge, we are the first to utilize deep learning to tackle such a problem. In such a deep learning framework, double supervisions: points on the symmetry plane and normal vectors are employed to help us pinpoint the symmetry plane. We conducted experiments on the YCB- video dataset and demonstrate the efficacy of our method.